
Computer-Mediated Surgery
Teleoperated Microsurgical Robot
| One of the first systems
to incorporate all these features in a surgical simulator was developed for
eye surgery by MIT robotics scientist Ian Hunter. Hunterís microsurgical
robot (MSR) system incorporated features described above such as data
acquisition by CT and MRI scanning, use of finite element modeling of the
planned surgical procedure, a force-reflecting haptic feedback system which
enables the perception of tissue cutting forces, including those that would
normally be imperceptible to the surgeon if they were transmitted directly to
his hands. |
|
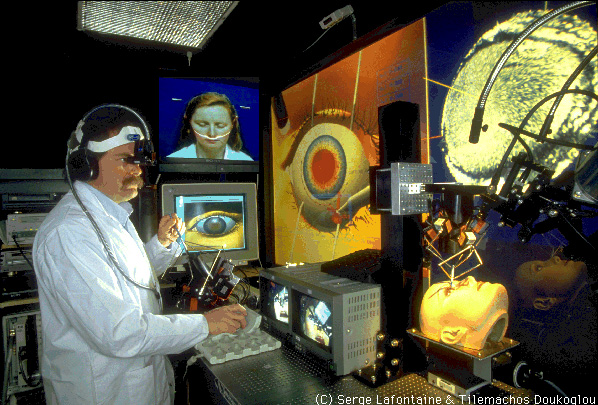
| A distinctive feature of
Hunterís MSR is its immersive virtual environment which fuses video, touch,
and sound into a virtual reality experience. The haptic environment in
Hunterís system is fused with 3D stereo camera images fed to a head-mounted
display. As if in a flight simulator the surgeon can rehearse his procedure
on the model of the individual patient he has constructed. In addition, the
model can be used as a training site for student surgeons, co-present during
a practice surgery, sharing the same video screen and feeling the same
surgical moves as the master surgeon. But such systems can also be deployed
in a collaborative telesurgery system, allowing different specialists to be
faded in to ìtake the controlsî during different parts of the procedure.
Indeed, a ìcollaborative clinicî incorporating these features was
demonstrated at NASA-Ames on May 5, 1999 with participants at five different
sites around the US. |