|
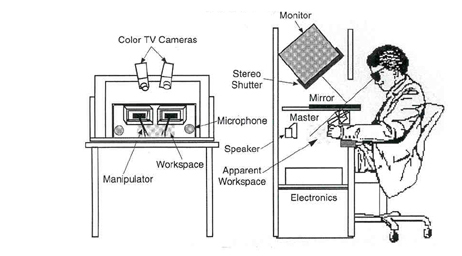
Philip Green led a team
at SRI that assembled the first working model of a telepresence surgery
system in 1991, and with funding from the NIH Green went on to design and
build a demonstration system. The proposal contained the diagram shown in
Fig. 1, showing the concept of workstation, viewing arrangement, and
manipulation configuration used in the surgical telepresence systems today.
In1992 SRI obtained funding for a second-generation telepresence system for
emergency surgeries in battlefield situations. For this second-generation
system the SRI team developed the precise servo-mechanics, force-feedback,
3-D visualization and surgical instruments needed to build a computer-driven
system that could accurately reproduce a surgeon's hand motions with remote
surgical instruments having 5-degrees of freedom and extremely sensitive
tactile response.
|