Tele-robotic ultrasound imaging for soft tissue guidance

Telerobotic real-time ultrasound image-guidance

Research topics
-
•Design and implementation of minimally interfering compact manipulator(s) for remote ultrasound imaging
-
•Strategies to incorporate manipulator and imaging hardware in radiotherapy treatment designs
-
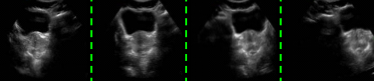
•Real-time intra-modality registration algorithms for target tracking during delivery
Publications and presentations
-
•Schlosser J, Salisbury JK, and Hristov DH; Telerobotic system concept for real-time soft-tissue imaging during radiotherapy beam delivery, Med. Phys. 37, 6357 (2010). Featured on the cover of Medical Physics and Medical Physics Web.
-
•Schlosser J, Salisbury JK, Jeffrey RB, and Hristov DH; Real-Time Soft-Tissue Imaging Concurrent with External Beam Radiation Therapy Delivery, AAPM Annual Meeting, July 18-22, Philadelphia, PA., (2010). Second place in the Young Investigator Symposium (from ~200 submissions) (download)
-
•Hristov DH, Schlosser J, Salisbury K, Oralkan O, and Khuri-Yakub P; Real-Time-Image Guidance in Radiation Therapy: Is There a Role for Ultrasound Imaging, Real-Time Image Guidance for Radiation Therapy, AAPM Symposium, AAPM Annual Meeting, July 18-22, Philadelphia, PA., (2010). Available online in the AAPM Virtual Library.
-
•Schlosser J, Salisbury JK, Jeffrey RB, and Hristov DH; Evaluation of a Telerobotic System Concept For Real-Time Soft-Tissue Image Guidance During Radiotherapy Delivery, oral presentation at the ASTRO’s 2010 Annual Meeting, October 31 – November 4, San Diego, CA, 2010. (download)


Clinical challenge
The curative potential of external beam radiation therapy is critically dependent on having the ability to accurately aim radiation beams at intended targets while avoiding surrounding healthy tissues. However existing radiotherapy-guidance technologies are incapable of real-time, volumetric, soft-tissue imaging during radiation beam delivery, when accurate target tracking is most critical. We are addressing this challenge in the development and evaluation of a novel, minimally interfering, telerobotic ultrasound (US) imaging system that can be integrated with existing medical linear accelerators (LINACs) for therapy guidance. The project is supported by the Stanford Bio-X Interdisciplinary Initiatives Program and Philips Ultrasound.