Hypergradient acceleration
This blog post considers hypergradient descent (HDM), a stepsize adaptation heuristic for gradient-based methods (Baydin et al. 2017; Schraudolph 1999). Recent advances on HDM use online learning to provide a theoretical justification of HDM on smooth convex functions, and the main finding is that HDM can perform competitively with the “optimal stepsize \(\alpha^\star\)” for the iteration trajectory (Gao et al. 2025a, 2025b; Chu et al. 2025b, 2025a). As a consequence, HDM is able to improve dependence on problem conditioning (e.g., smoothness) in the convergence rate. However, in the general smooth convex case, improving dependence on smoothness would not improve the \(\mathcal{O}\!\left(\tfrac{1}{K}\right)\) convergence rate. In this post, we consider a special case where HDM is able to produce \(o\!\left(\tfrac{1}{K}\right)\) rate of convergence. The idea is that, if the Hessian of a function vanishes around its optimum (i.e. \(\|\nabla^2 f(x^\star)\| = 0\)), then HDM will automatically increase the stepsize and obtain accelerated rate.
Introduction and background
HDM used to be a popular heuristic in optimization for deep learning. Given an unconstrained problem \[
\min_{x \in \mathbb{R}^n} \quad f(x),
\] HDM works by doing a hypergradient descent step \((1)\) before standard gradient descent (step \((2)\)): \[
\alpha_{k+1} = \alpha_k + \eta \, \tfrac{\langle \nabla f(x^k - \alpha_k \nabla f(x^k)),\, \nabla f(x^k) \rangle}{\|\nabla f(x^k)\|^2} \tag{1}
\]
\[ x^{k+1} = x^k - \alpha_{k+1} \nabla f(x^k) \tag{2} \] where \(\{\alpha_k\}\) is known as a stepsize sequence and \(\{x^k\}\) is the iterate sequence; \(\eta > 0\) is an algorithm parameter known as hypergradient descent learning rate. Here’s what \((1)\) does:
- Construct a test point \(x^k - \alpha_k \nabla f(x^k)\) with the current stepsize.
- Increase/decrease the stepsize by the normalized inner product \(\tfrac{\langle \nabla f(x^k - \alpha_k \nabla f(x^k)),\, \nabla f(x^k) \rangle}{\|\nabla f(x^k)\|^2}\).
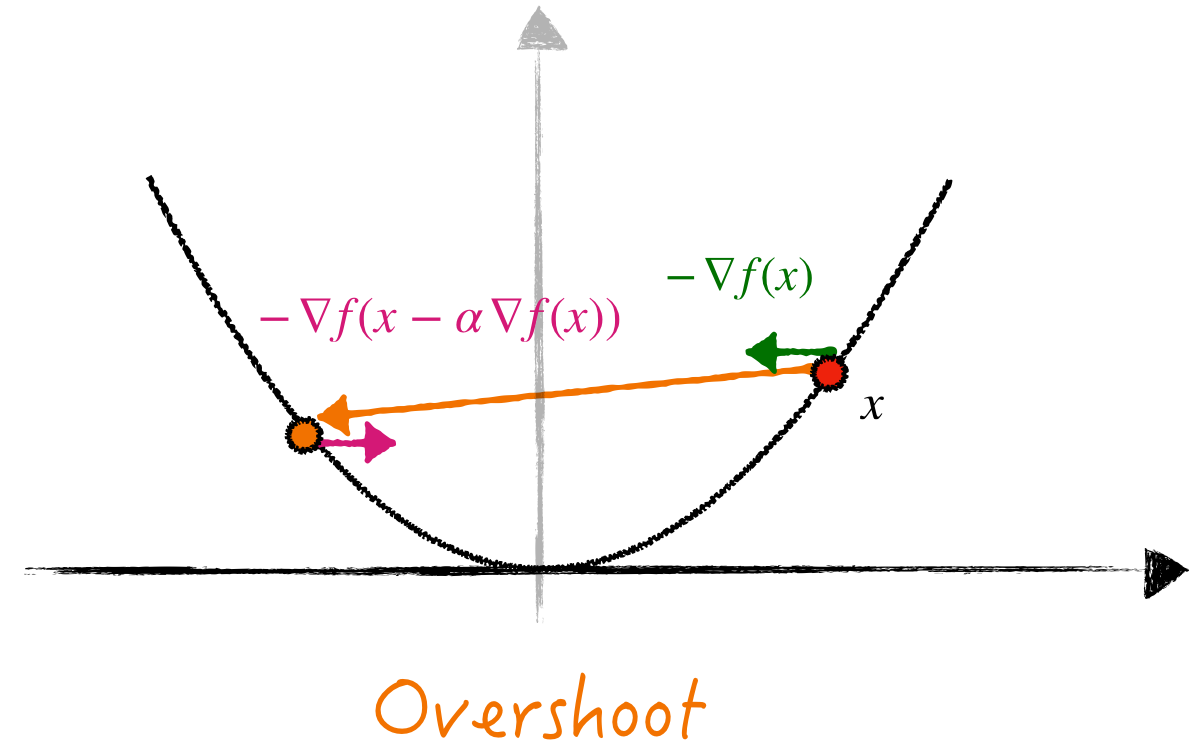
To understand the intuition of \((1)\), consider a 1D quadratic function \(f(x) = \tfrac{1}{2}x^2\). We have \(\nabla f(x) = x\) and \[ x - \alpha \nabla f(x) = x - \alpha x = (1 - \alpha) x. \] Here are some observations:
- From any point \(x\), we know that stepsize \(\alpha^\star = 1\) would bring us to \(x^\star = 0\). So let’s call \(\alpha^\star\) optimal.
- If we use stepsize \(\alpha > 1\), then a gradient descent step “overshoots” the solution and zig-zags between two branches of the graph (Figure 1, left), hence the (negative) gradient direction between two consecutive iterates will have different signs: \(\langle \nabla f(x - \alpha \nabla f(x)), \nabla f(x) \rangle < 0\). Step \((1)\) (with small \(\eta > 0\)) encourages \(\alpha_{k+1}\) to get closer to \(\alpha^\star\).
- Similarly, if \(\alpha < 1\), the iterate will stay on one branch of the graph (Figure 1, right), making \(\langle \nabla f(x - \alpha \nabla f(x)), \nabla f(x) \rangle > 0\). Again, step \((1)\) encourages \(\alpha_{k+1}\) to get closer to \(\alpha^\star\).
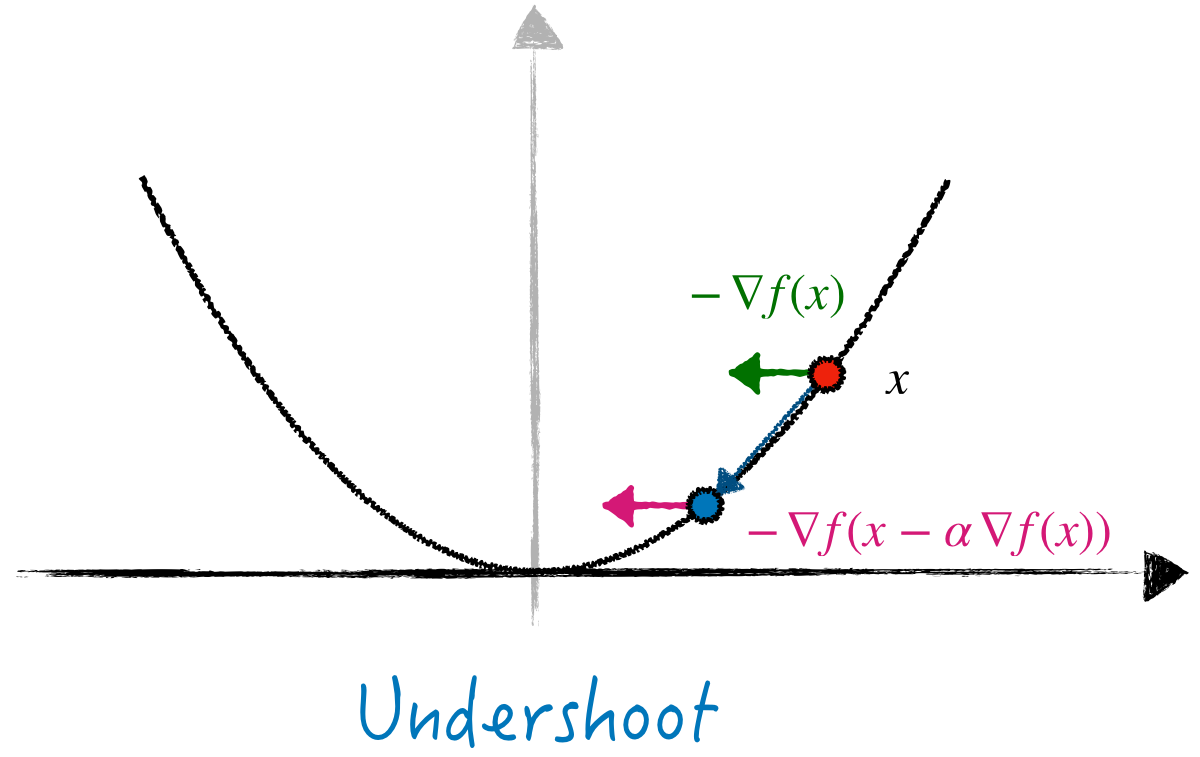
HDM will decrease/increase the stepsize accordingly.
In this simple scalar case, HDM can be interpreted as adaptively adjusting the stepsize based on how much the gradients in consecutive iterations align with each other. This particular idea first appeared in a 30-year old heuristic called Delta-Bar-Delta (Jacobs 1988), the origin of HDM-type methods.
Optimal stepsize and HDM. The intuition from the 1D toy example suggests that HDM should somewhat match the performance of a good stepsize.
To get a better sense of what “a good stepsize” means, suppose \(f\) is convex and twice-continuously differentiable. Then the largest eigenvalue of the Hessian, \(\|\nabla^2 f(x)\|\), provides a good surrogate of a “locally” good stepsize: \(\alpha \sim \mathcal{O}\!\left(\tfrac{1}{\|\nabla^2 f(x)\|}\right)\). In particular, if \(f\) has \(L\)-Lipschitz continuous gradient (\(L\)-smooth), then \(\|\nabla^2 f(x)\| \leq L\), and a good stepsize becomes \(\alpha \sim \mathcal{O}\!\left(\tfrac{1}{L}\right)\), a quantity that often appears in the convergence analysis of gradient descent.
Very informally, we can summarize the convergence guarantee of HDM as follows.
Theorem 1 (Very informal) For \(L\)-smooth convex problems, HDM can achieve the performance of a good constant stepsize \(\alpha \sim \mathcal{O}\!\left(\tfrac{1}{L}\right)\).
Theorem 1 was first established in (Gao et al. 2025a, 2025b; Chu et al. 2025b, 2025a). These works show that, as a consequence of achieving the performance of a good constant stepsize, HDM obtains improved dependence on conditioning-related constants. In other words, if gradient descent achieves \(\mathcal{O}\!\left(\tfrac{C}{K}\right)\) rate with a good constant stepsize, then HDM can match this performance (asymptotically).
This result is fine, but only being able to improve constants looks unsatisfactory. So a question arises:
Are there cases where
HDMcan provably obtain convergence rate improvement?
The rest of this blog addresses this question.
Functions with vanishing curvature around the optimum
Recall that we argued that HDM will match the performance of stepsize \(\mathcal{O}\!\left(\tfrac{1}{L}\right)\) when \(f\) is \(L\)-smooth. But \(L\)-smoothness is a global property, and we emphasized that the performance of HDM should be determined by a locally good stepsize: \(\alpha \sim \mathcal{O}\!\left(\tfrac{1}{\|\nabla^2 f(x)\|}\right)\). In particular, we focus on the local behavior around \(x^\star\), which is determined by \(\|\nabla^2 f(x^\star)\|\).
An interesting question here: what if \(\|\nabla^2 f(x^\star)\| = 0\)? Is it possible? Consider \(f(x) = \tfrac{1}{4}x^4\) with \(x^\star = 0\). Then \(\nabla^2 f(x) = 3x^2\) and \(\|\nabla^2 f(x^\star)\| = 0\). Graphically, this function is flat around its optimum (Figure 2).
Other examples. There are many other functions that satisfy \(\|\nabla^2 f(x^\star)\| = 0\). Typical examples are cross entropy for logistic regression, exponential loss, \(\ell_p\) regression or powered hinge loss (Orabona 2019). See Section 2.1 of (Gao et al. 2026) and (Fox et al. 2025) for more details.
What would happen if we run HDM on \(\tfrac{1}{4}x^4\)? Or, what does it mean by matching the \(\mathcal{O}\!\left(\tfrac{1}{\|\nabla^2 f(x^\star)\|}\right)\) stepsize when \(\|\nabla^2 f(x^\star)\| = 0\)? Perhaps unsurprisingly, when we run HDM (Figure 3, right), the stepsize consistently increases. In other words, \(\alpha^\star = \infty\) and HDM will keep increasing the stepsize when \(x^k\) approaches \(x^\star\).
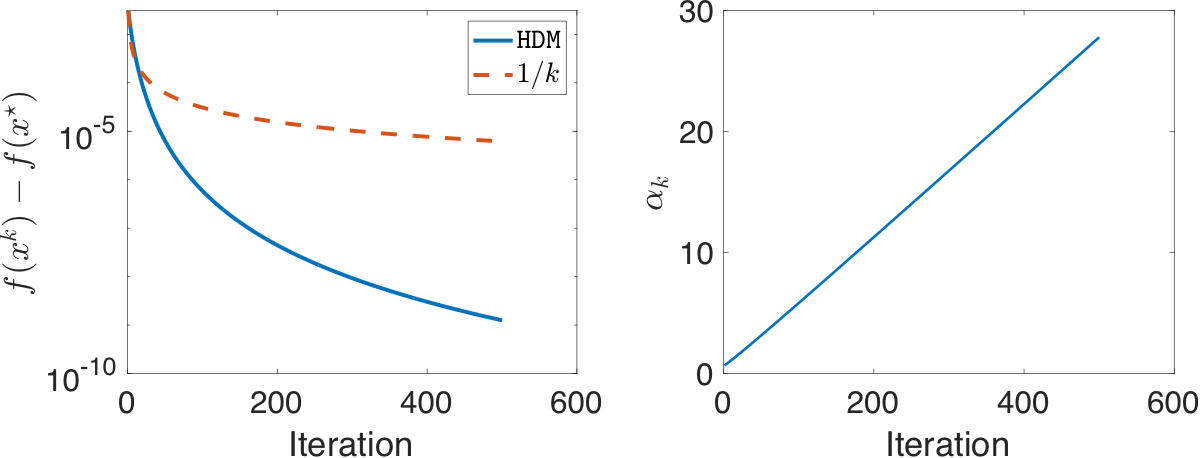
HDM on \(f(x) = \tfrac{1}{4}x^4\). The stepsize \(\{\alpha_k\}\) keeps increasing and the convergence rate is faster than \(\mathcal{O}\!\left(\tfrac{1}{K}\right)\) predicted by theory.Another interesting observation is the convergence rate (Figure 3, left). It seems HDM is converging faster than \(\mathcal{O}\!\left(\tfrac{1}{K}\right)\). Why does this happen? Recall the convergence rate of gradient on \(L\)-smooth functions \[
f(x^{K+1}) - f(x^\star) \leq \tfrac{L D^2}{K},
\] where \(D\) is some constant and \(L\) is the global smooth constant. This is a universal yet pessimistic estimate: when \(x^k \to x^\star\), what really matters is the local smoothness around \(x^\star\) determined by \(\|\nabla^2 f(x^\star)\|\). When \(\|\nabla^2 f(x^\star)\| = 0\), we are able to use a much smaller smoothness constant (say \(\hat{L}\)) than \(L\). Since \(\hat{L} \to 0\) as \(x \to x^\star\), then we expect an improved convergence rate if \(\hat{L}\) scales as \(\operatorname{poly}(K^{-1})\). Theorem 2 formalizes this idea.
Theorem 2 If \(f\) is \(L\)-smooth and satisfies \[
\|\nabla^2 f(x)\| \leq c\,[f(x) - f(x^\star)]^\beta,
\] then HDM has convergence rate \(\mathcal{O}\!\left(\tfrac{1}{K^{1+\beta}}\right)\).
Hypergradient acceleration
This section formalizes Theorem 2 and starts with a short recap of the convergence analysis of hypergradient descent. The analysis is similar to (Gao et al. 2025b), but no background of online learning is required.
Online stepsize learning and hypergradient descent
Feel free to skip this section if you are familiar with online learning. Recall the previous intuition: HDM will adjust the stepsize to get closer to a good stepsize. How to mathematically quantify this intuition? Suppose there is some good stepsize \(\alpha^\star\), then we can define a distance function \(\operatorname{dist}(\alpha, \alpha^\star)\) to quantify such “closeness”. Let’s choose the squared Euclidean distance \[
g(\alpha) := \operatorname{dist}(\alpha, \alpha^\star) := \tfrac{1}{2}(\alpha - \alpha^\star)^2.
\] Then, getting closer to a good stepsize can be quantified by \[
\tfrac{1}{2}(\alpha_{k+1} - \alpha^\star)^2 \leq \tfrac{1}{2}(\alpha_k - \alpha^\star)^2. \tag{3}
\] Now another question arises: why/how can we ensure that \((3)\) holds? Since we want to reduce the distance function \(g(\alpha) = \operatorname{dist}(\alpha, \alpha^\star)\), the most straightforward way is to find a descent direction of \(g\).
Recall that a direction \(d\) is a descent direction of a function \(g(\alpha)\) at \(\alpha\) if \[ {\color{orange}\langle [-\nabla g(\alpha)], d \rangle} > 0. \] In other words, \(d\) should form an acute angle with the negative gradient direction \(-\nabla g(\alpha)\). To see why \(d\) is a descent direction, when \(g\) is \(L\)-smooth, we have \[ g(\alpha + \eta d) \leq g(\alpha) + \eta \langle \nabla g(\alpha), d \rangle + \tfrac{\eta^2}{2}\|d\|^2 = g(\alpha) - \eta \underbrace{{\color{orange}\langle [-\nabla g(\alpha)], d \rangle}}_{> 0} + \tfrac{L\eta^2}{2}\|d\|^2 \] where \(\langle -\nabla g(\alpha), d \rangle > 0\) is by definition of descent direction. Letting \(\eta \to 0\), we always have \(g(\alpha + \eta d) < g(\alpha)\). With \(g(\alpha) = \tfrac{1}{2}(\alpha - \alpha^\star)^2\) and \(\nabla g(\alpha) = \alpha - \alpha^\star\), we essentially need a direction \(d\) such that \[ 0 < \langle -\nabla g(\alpha), d \rangle = -\langle {\color{blue}\alpha - \alpha^\star}, d \rangle. \] Where can we find such a descent direction? The answer is convexity: a convex function satisfies \[ h(\alpha^\star) \geq h(\alpha) + \langle \nabla h(\alpha), {\color{blue}\alpha^\star - \alpha} \rangle \qquad \Leftrightarrow \quad {\color{red}\langle -\nabla g(\alpha), -\nabla h(\alpha) \rangle} \geq h(\alpha) - h(\alpha^\star). \] Whenever we can find a function \(h\) such that
- \(h\) is convex and \(\nabla h\) is computable, and
- \(h\) is (approximately) minimized by \(\alpha^\star\) so that \(h(\alpha) - h(\alpha^\star) \geq 0\),
then the gradient \(-\nabla h(\alpha)\) is a descent direction of \(g(\alpha) = \tfrac{1}{2}(\alpha - \alpha^\star)^2\). Let’s instantiate the descent property. Say we already have such a convex function \(h(\alpha)\) and do a gradient descent step on \(\alpha\): \[ \alpha_+ = \alpha + \eta d = \alpha - \eta \nabla h(\alpha). \] Then combining the following facts:
- \(d = -\nabla h(\alpha)\)
- \(g(\alpha) = \tfrac{1}{2}(\alpha - \alpha^\star)^2\) is \(1\)-smooth: \[ g(\alpha - \eta \nabla h(\alpha)) \leq g(\alpha) + \langle \nabla g(\alpha), \eta \nabla h(\alpha) \rangle + \tfrac{\eta^2}{2}\|d\|^2 = g(\alpha) - \eta {\color{red}\langle -\nabla g(\alpha), -\nabla h(\alpha) \rangle} + \tfrac{\eta^2}{2}\|d\|^2 \]
- \({\color{red}\langle -\nabla g(\alpha), -\nabla h(\alpha) \rangle} \geq h(\alpha) - h(\alpha^\star)\) by convexity
gives the descent inequality for \(g(\alpha)\): \[ \begin{aligned} \tfrac{1}{2}(\alpha_+ - \alpha^\star)^2 &= g(\alpha - \eta \nabla h(\alpha)) \\ &\leq g(\alpha) - \eta {\color{red}\langle -\nabla g(\alpha), -\nabla h(\alpha) \rangle} + \tfrac{\eta^2}{2}\|\nabla h(\alpha)\|^2 \\ &\leq g(\alpha) - \eta[h(\alpha) - h(\alpha^\star)] + \tfrac{\eta^2}{2}\|\nabla h(\alpha)\|^2 \\ &= \tfrac{1}{2}(\alpha - \alpha^\star)^2 - \eta[h(\alpha) - h(\alpha^\star)] + \tfrac{\eta^2}{2}\|\nabla h(\alpha)\|^2. \end{aligned} \] The intuition from the above relation is clear: for any convex function \(h\), if \(\alpha\) underperforms \(\alpha^\star\) (i.e., \(h(\alpha) > h(\alpha^\star)\) since we are minimizing), then stepping in the direction \(-\nabla h(\alpha)\) with a small stepsize \(\eta > 0\) decreases the distance to \(\alpha^\star\). In other words, we learn \(\alpha^\star\) through loss function \(h\).
The key intuition is that, the more we underperform, the more we learn: \[
\underbrace{\tfrac{1}{2}(\alpha_+ - \alpha^\star)^2 - \tfrac{1}{2}(\alpha - \alpha^\star)^2}_{\text{How much we learn}} \leq -\eta \left[\underbrace{h(\alpha) - h(\alpha^\star)}_{\text{How much we underperform}}\right] + {\color{gray}\tfrac{\eta^2}{2}\underbrace{\|\nabla h(\alpha)\|^2}_{\mathcal{O}(\eta^2)\text{ error term}}}.
\] Back to the context of hypergradient descent. We need some function \(h(\alpha)\) (approximately) minimized by a good stepsize \(\alpha^\star\). What function takes a small value when a good stepsize is used? A straightforward one is the function value \(f(x - \alpha \nabla f(x))\), or equivalently, the relative progress associated with \(\alpha\): \[
h_x(\alpha) = \tfrac{f(x - \alpha \nabla f(x)) - f(x)}{\|\nabla f(x)\|^2}.
\] It is easy to verify that \(\nabla h_x(\alpha) = \tfrac{-\langle \nabla f(x - \alpha \nabla f(x)), \nabla f(x) \rangle}{\|\nabla f(x)\|^2}\), and the hypergradient descent step \((1)\) becomes \[
\alpha_{k+1} = \alpha_k + \eta \tfrac{\langle \nabla f(x^k - \alpha_k \nabla f(x^k)), \nabla f(x^k) \rangle}{\|\nabla f(x^k)\|^2} = \alpha_k - \eta \nabla h_x(\alpha_k),
\] which is known as online gradient descent. How to analyze HDM? Recall the relation \[
\tfrac{1}{2}(\alpha_{k+1} - \alpha^\star)^2 - \tfrac{1}{2}(\alpha_k - \alpha^\star)^2 \leq -\eta[h_{x^k}(\alpha_k) - h_{x^k}(\alpha^\star)] + {\color{gray}\tfrac{\eta^2}{2}\|\nabla h_{x^k}(\alpha_k)\|^2}.
\] When we measure the cumulative amount we have learned over a time horizon \(K\), we have, for \(\eta \leq \tfrac{1}{L}\), that \[
\begin{aligned}
\underbrace{\tfrac{1}{2}(\alpha_{K+1} - \alpha^\star)^2 - \tfrac{1}{2}(\alpha_1 - \alpha^\star)^2}_{\text{How much we learn over $K$ steps}}
&= \sum_{k=1}^K \underbrace{\tfrac{1}{2}(\alpha_{k+1} - \alpha^\star)^2 - \tfrac{1}{2}(\alpha_k - \alpha^\star)^2}_{\text{How much we learn in step }k} \\
&\leq -\eta \sum_{k=1}^K \left[\underbrace{h_{x^k}(\alpha_k) - h_{x^k}(\alpha^\star)}_{\text{How much $\{\alpha_k\}$ underperforms in step }k}\right] + {\color{gray}\tfrac{\eta^2}{2}\sum_{k=1}^K \|\nabla h_{x^k}(\alpha_k)\|^2} \\
&\leq -\eta \underbrace{\sum_{k=1}^K [h_{x^k}({\color{red}\alpha_{k+1}}) - h_{x^k}(\alpha^\star)]}_{\text{How much $\{{\color{red}\alpha_{k+1}}\}$ underperforms over $K$ steps}},
\end{aligned}
\] where the last step uses the fact that \(h_x\) is \(L\)-smooth and that \(h_{x^k}(\alpha_{k+1}) \leq h_{x^k}(\alpha_k) - \left(\eta - \tfrac{L\eta^2}{2}\right)\|\nabla h_{x^k}(\alpha_k)\|^2\) to cancel the error term. Over the \(K\) steps, the more \(\{{\color{red}\alpha_{k+1}}\}\) underperforms, the more we learn. Let’s rephrase this intuition:
- Suppose \(\alpha^\star\) is finite \(\Rightarrow\) there is finite that we can learn \(\Rightarrow\) there is finite that we can underperform
Mathematically, we have \[ \underbrace{\sum_{k=1}^K [h_{x^k}(\alpha_{k+1}) - h_{x^k}(\alpha^\star)]}_{\text{How much $\{{\color{red}\alpha_{k+1}}\}$ underperforms}} \leq \underbrace{\tfrac{1}{2\eta}(\alpha_1 - \alpha^\star)^2 - \tfrac{1}{2\eta}(\alpha_{K+1} - \alpha^\star)^2 \leq \tfrac{1}{2\eta}(\alpha_1 - \alpha^\star)^2}_{\text{Finite to learn}}. \tag{4} \] Finally, given that \(\{\alpha_{k+1}\}\) has finite underperformance over \(K\) steps, it remains to connect it with the convergence rate, which is given by the following reduction lemma.
Lemma 1 (Reduction lemma (Gao et al. 2025a)) Suppose \(f\) is convex, then HDM generates \(\{x^k\}\) such that \[
f(x^{K+1}) - f(x^\star) \leq \tfrac{\Delta^2}{K} \tfrac{1}{\max\!\left\{-\frac{1}{K}\sum_{k=1}^K h_{x^k}(\alpha_{k+1}),\, 0\right\}} \leq \tfrac{\Delta^2}{K} \tfrac{1}{\max\!\left\{-\frac{1}{K}\sum_{k=1}^K h_{x^k}(\alpha^\star) - \tfrac{1}{2\eta}(\alpha_1 - \alpha^\star)^2,\, 0\right\}}
\] for any \(\alpha^\star \in \mathbb{R}\), where \(\Delta := \max_{x \in \{x : f(x) \leq f(x^1)\}} \min_{x^\star \in \{x : f(x) = f(x^\star)\}} \|x - x^\star\|\).
The power of Lemma 1 lies in the freedom for choosing \(\alpha^\star\). First, for an \(L\)-smooth function, we always have \(f\!\left(x - \tfrac{1}{L}\nabla f(x)\right) - f(x^\star) \leq \tfrac{1}{2L}\|\nabla f(x)\|^2\), which implies \(h_{x^k}\!\left(\tfrac{1}{L}\right) \leq -\tfrac{1}{2L}\): plugging in \(\alpha^\star = \tfrac{1}{L}\) gives the following baseline convergence result:
Lemma 2 Suppose \(f\) is \(L\)-smooth, convex. Then HDM with \(\eta = \tfrac{1}{L}\) generates \(\{x^k\}\) such that \[
f(x^{K+1}) - f(x^\star) \leq \tfrac{2L\Delta^2}{K} \tfrac{2K}{2K - L^2\!\left(\alpha_1 - \tfrac{1}{L}\right)^2},
\] where \(\Delta\) is defined in Lemma 1. In particular, if \(\alpha_1 = \tfrac{1}{L}\), we have \(f(x^{K+1}) - f(x^\star) \leq \tfrac{2L\Delta^2}{K}\).
Proof. The proof follows by plugging in \(\alpha^\star = \tfrac{1}{L}\) and applying \(h_{x^k}\!\left(\tfrac{1}{L}\right) \leq -\tfrac{1}{2L}\).
Convergence rate acceleration
Lemma 2 provides a baseline \(\mathcal{O}\!\left(\tfrac{1}{K}\right)\) convergence rate. But as we previously mentioned, we should expect a faster rate than \(\mathcal{O}\!\left(\tfrac{1}{K}\right)\) when the function becomes flat as the iterates approach optimality:
A1. We have \(\|\nabla f(x) - \nabla f(y)\| \leq c_\delta \|x - y\|\) for all \(x, y \in \mathcal{L}_\delta := \{x : f(x) - f(x^\star) \leq \delta\}\), where \(c_\delta \leq L\).
Under A1, it is feasible to plug in \(\alpha^\star \gg \tfrac{1}{L}\) to reduce \(h_{x^k}(\alpha^\star)\), as shown by Lemma 3.
Lemma 3 Under A1, we have \(h_x\!\left(\tfrac{1}{c_\delta}\right) \leq -\tfrac{1}{2c_\delta}\) for all \(x \in \mathcal{L}_\delta\).
Now we are ready to prove the main result.
Theorem 3 Suppose \(f\) is \(L\)-smooth, convex and satisfies A1, then for all \(K \geq \tfrac{2L\Delta^2}{\delta}\), HDM with \(\eta = \tfrac{1}{L}\) satisfies \[
f(x^{2K+1}) - f(x^\star) \leq \tfrac{4\Delta^2}{K} \tfrac{c_{2L\Delta^2 K^{-1}}}{\max\!\left\{1 - \tfrac{L}{K c_{2L\Delta^2 K^{-1}}},\, 0\right\}}.
\]
Proof. Our analysis will follow a two-phase argument. Suppose HDM is run for \(2K\) iterations. Then \[
f(x^{2K+1}) - f(x^\star) \leq \tfrac{c_{2L\Delta^2 K^{-1}}}{K} \tfrac{4\Delta^2}{\max\!\left\{1 - \tfrac{L}{K\eta}(\alpha_2^\star)^2,\, 0\right\}}
\] by Lemma 1. According to \((4)\), we can decompose \(\Sigma := \sum_{k=1}^{2K} h_{x^k}(\alpha_{k+1})\) into \[
\begin{aligned}
\Sigma_1 &:= \sum_{k=1}^K h_{x^k}(\alpha_{k+1}) \leq \sum_{k=1}^K h_{x^k}(\alpha_1^\star) + \tfrac{1}{2\eta}(\alpha_1 - \alpha_1^\star)^2 - \tfrac{1}{2\eta}(\alpha_{K+1} - \alpha_1^\star)^2 \\
\Sigma_2 &:= \sum_{k=K+1}^{2K} h_{x^k}(\alpha_{k+1}) \leq \sum_{k=1}^K h_{x^k}(\alpha_2^\star) + \tfrac{1}{2\eta}(\alpha_{K+1} - \alpha_2^\star)^2 - \tfrac{1}{2\eta}(\alpha_{2K+1} - \alpha_2^\star)^2.
\end{aligned}
\] To bound \(\Sigma_1\), we take \(\alpha_1^\star = \alpha_1 = \tfrac{1}{L}\) and \(\Sigma_1 \leq -\tfrac{K}{2L} + \tfrac{1}{2\eta}\underbrace{(\alpha_1 - \alpha_1^\star)^2}_{=\,0} - \tfrac{1}{2\eta}(\alpha_{K+1} - \alpha_1^\star)^2\).
To bound \(\Sigma_2\), we notice that after the first \(K\) iterations, \(f(x^{K+k}) - f(x^\star) \leq \tfrac{2L\Delta^2}{K}\) for all \(k \in [K]\) by monotonicity of the algorithm and Lemma 2, which implies \(x^{K+k} \in \mathcal{L}_\delta\) since \(K \geq \tfrac{2L\Delta^2}{\delta}\). Taking \(\alpha_2^\star = \tfrac{1}{c_{2L\Delta^2 K^{-1}}}\), we have \(h_{x^k}(\alpha_2^\star) \leq -\tfrac{1}{2c_{2L\Delta^2 K^{-1}}}\) and \[ \sum_{k=K+1}^{2K} h_{x^k}(\alpha_{k+1}) \leq -\tfrac{K}{2c_{2L\Delta^2 K^{-1}}} + \tfrac{1}{2\eta}(\alpha_{K+1} - \alpha_2^\star)^2 - \tfrac{1}{2\eta}(\alpha_{2K+1} - \alpha_2^\star)^2. \] Summing up \(\Sigma_1\) and \(\Sigma_2\): \[ \begin{aligned} \Sigma &= \Sigma_1 + \Sigma_2 \\ &\leq -\tfrac{K}{2L} - \tfrac{1}{2\eta}(\alpha_{K+1} - \alpha_1^\star)^2 - \tfrac{K}{2c_\delta} + \tfrac{1}{2\eta}(\alpha_{K+1} - \alpha_2^\star)^2 - \tfrac{1}{2\eta}(\alpha_{2K+1} - \alpha_2^\star)^2 \\ &\leq -\tfrac{K}{2c_\delta} - \tfrac{1}{2\eta}(\alpha_{K+1} - \alpha_1^\star)^2 + \tfrac{1}{2\eta}(\alpha_{K+1} - \alpha_2^\star)^2 \\ &= -\tfrac{K}{2c_\delta} - \tfrac{1}{2\eta}(2\alpha_{K+1} - \alpha_1^\star - \alpha_2^\star)(\alpha_2^\star - \alpha_1^\star). \end{aligned} \] Since \(\alpha_2^\star = \tfrac{1}{c_{2L\Delta^2 K^{-1}}} \geq \alpha_1^\star\), we have \((2\alpha_{K+1} - \alpha_1^\star - \alpha_2^\star)(\alpha_2^\star - \alpha_1^\star) \geq (\alpha_1^\star)^2 - (\alpha_2^\star)^2\) and \[ \Sigma \leq -\tfrac{K}{2c_{2L\Delta^2 K^{-1}}} + \tfrac{1}{2\eta}(\alpha_2^\star)^2 = -\tfrac{K}{2c_{2L\Delta^2 K^{-1}}} + \tfrac{1}{2\eta}\left(\tfrac{1}{c_{2L\Delta^2 K^{-1}}}\right)^2. \] Plugging \(\Sigma\) back gives \[ \begin{aligned} f(x^{2K+1}) - f(x^\star) &\leq \tfrac{\Delta^2}{K} \tfrac{1}{\max\!\left\{-\frac{1}{2K}\sum_{k=1}^{2K} h_{x^k}(\alpha_{k+1}),\, 0\right\}} \\ &\leq \tfrac{4\Delta^2}{K} \tfrac{c_{2L\Delta^2 K^{-1}}}{\max\!\left\{1 - \tfrac{L}{Kc_{2L\Delta^2 K^{-1}}},\, 0\right\}} \end{aligned} \] and completes the proof.
By specifying concrete expressions of \(c_\delta\), we can get convergence rate improvement.
Proof. Since \(\beta \in [0,1)\), \(c_{2L\Delta^2 K^{-1}} = \mathcal{O}(K^{-\beta})\) and \(\tfrac{1}{Kc_{2L\Delta^2 K^{-1}}} = o(1)\) and \[ \tfrac{4\Delta^2}{K} \tfrac{c_{2L\Delta^2 K^{-1}}}{\max\!\left\{1 - \tfrac{L}{Kc_{2L\Delta^2 K^{-1}}},\, 0\right\}} = \mathcal{O}\!\left(\tfrac{1}{K^{1+\beta}}\right). \qquad \square \]
Appendix: Proof of Lemma 3
Proof. Suppose \(x \in \mathcal{L}_\delta\) and let \(\alpha_x^\star = \arg\min_\alpha h_x(\alpha)\) be the steepest descent stepsize. We start by showing \(\alpha_x^\star \geq \tfrac{1}{c_\delta}\). Without loss of generality, we assume \(\alpha_x^\star\) is finite. Then \(h'_x(\alpha_x^\star) = 0\), \(h'_x(0) = -\tfrac{\langle \nabla f(x), \nabla f(x)\rangle}{\|\nabla f(x)\|^2} = -1\), and \[ \begin{aligned} 1 = |h'_x(\alpha_x^\star) - h'_x(0)| &= \left|\tfrac{\langle \nabla f(x - \alpha_x^\star \nabla f(x)) - \nabla f(x),\, \nabla f(x)\rangle}{\|\nabla f(x)\|^2}\right| \\ &\leq \tfrac{\|\nabla f(x - \alpha_x^\star \nabla f(x)) - \nabla f(x)\|}{\|\nabla f(x)\|} \\ &\leq \tfrac{c_\delta \alpha_x^\star \|\nabla f(x)\|}{\|\nabla f(x)\|} = c_\delta \alpha_x^\star, \end{aligned} \] giving \(\alpha_x^\star \geq \tfrac{1}{c_\delta}\). Next we deduce that \[ \begin{aligned} f(x - \alpha \nabla f(x)) - f(x) &= -\alpha \int_0^1 \langle \nabla f(x - \alpha t \nabla f(x)), \nabla f(x)\rangle \,\mathrm{d}t \\ &= -\alpha \int_0^1 \langle \nabla f(x - \alpha t \nabla f(x)) - \nabla f(x), \nabla f(x)\rangle \,\mathrm{d}t - \alpha \int_0^1 \|\nabla f(x)\|^2 \,\mathrm{d}t \\ &\leq -\alpha \|\nabla f(x)\|^2 + \alpha \int_0^1 \|\nabla f(x - \alpha t \nabla f(x)) - \nabla f(x)\| \cdot \|\nabla f(x)\| \,\mathrm{d}t \end{aligned} \] and for any \(\alpha \leq \alpha_x^\star\), we have \(f(x - \alpha \nabla f(x)) \leq f(x)\) and that \(x - \alpha \nabla f(x) \in \mathcal{L}_\delta\). Hence \(\|\nabla f(x - \alpha t \nabla f(x)) - \nabla f(x)\| \leq \alpha t c_\delta \|\nabla f(x)\|\), and we get \[ \begin{aligned} f(x - \alpha \nabla f(x)) - f(x) &\leq -\alpha \|\nabla f(x)\|^2 + \alpha \int_0^1 \alpha t c_\delta \|\nabla f(x)\|^2 \,\mathrm{d}t \\ &= -\alpha \|\nabla f(x)\|^2 + \tfrac{\alpha^2 c_\delta}{2}\|\nabla f(x)\|^2 = \left[\tfrac{\alpha^2 c_\delta}{2} - \alpha\right]\|\nabla f(x)\|^2. \end{aligned} \] Taking \(\alpha = \tfrac{1}{c_\delta} \leq \alpha_x^\star\), we get \[ h_x(\alpha_x^\star) \leq h_x(\alpha) = \tfrac{f(x - \alpha \nabla f(x)) - f(x)}{\|\nabla f(x)\|^2} \leq -\tfrac{1}{2c_\delta} \] and this completes the proof.