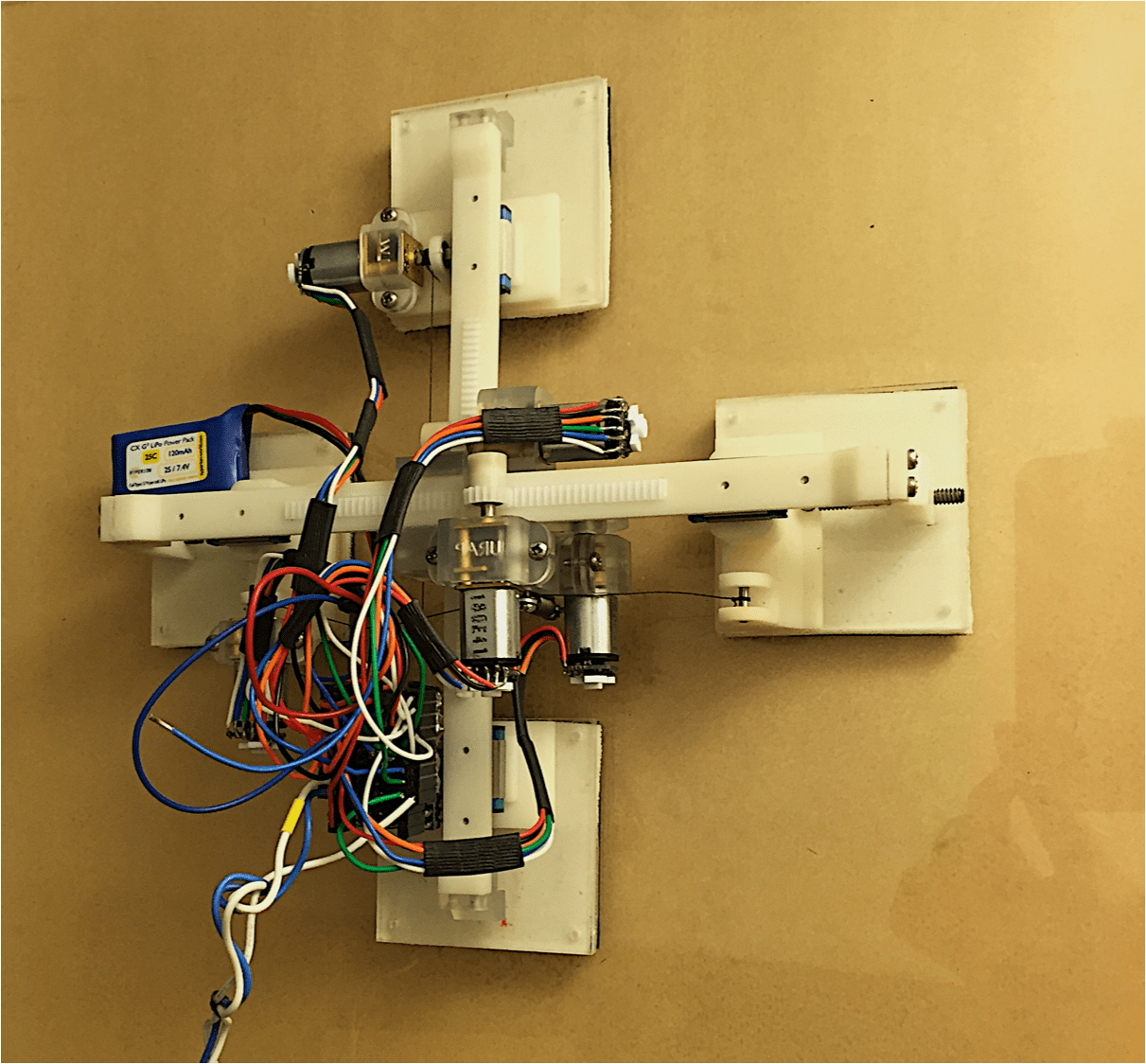
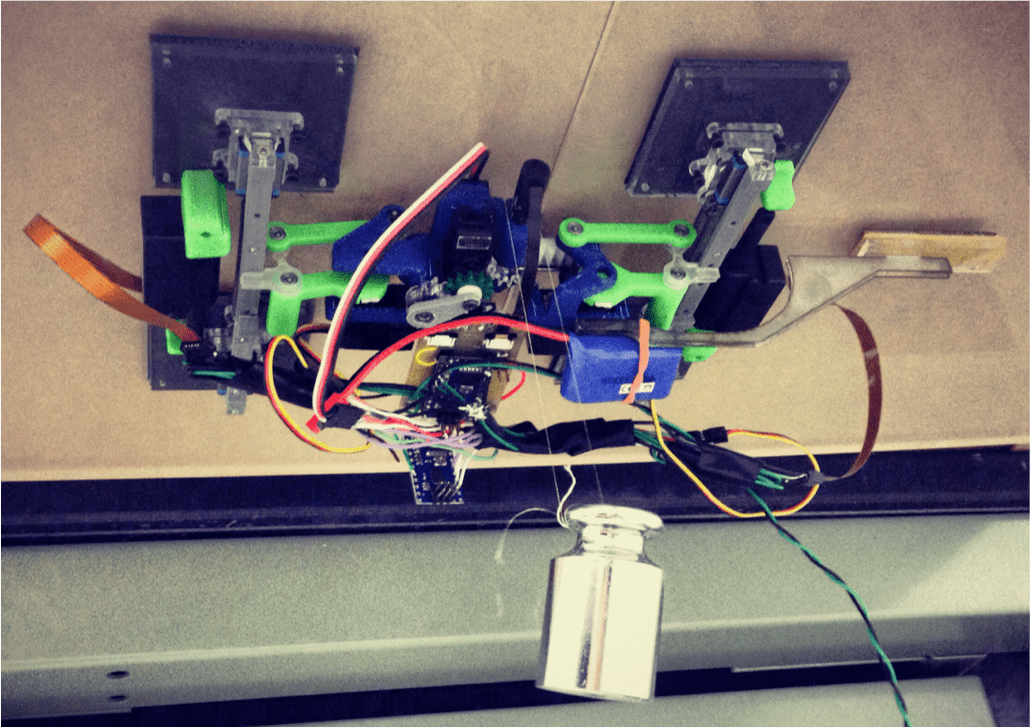
Gecko Adhesive Climbing Robots
Creator of ACRobot I and II, a gecko adhesive enabled climbing robot developed as a prototype for inspection of the ISS. ACRobot has flown on NASA’s Zero-Gravity flights (Vomit Comet) where it successfully climbed in zero gravity. ACRobot has been tested on several spacecraft materials & solar panels. ACRobot's ON/OFF gripping mechanism is now being tested in space on the International Space Station!
Conference paper: Inchworm Style Gecko Adhesive Climbing Robot, IROS 2014.
Conference paper: Zero Gravity Robotic Mobility Experiments with Electrostatic and Gecko-Like Adhesives Aboard NASA’s Zero Gravity Airplane.
Poster: 1st Place Award at Ohio State's 2014 Denman Undergraduate Research Forum.
Journal: Caltech Undergraduate Research Journal (CURJ)
Compliant Mechanisms
Designed and fabricated compliant mechanisms for gecko adhesive gripping mechanisms, climbing robots, 2-DoF x-y positioners, and variable stiffness mechanisms. Analysis of compliant mechanisms using psuedo-rigid body models. Developed new Shape Deposition Manufacturing (SDM) techniques for compliant an-isotropic flexures with embedded, mulit-material components.
Awarded NASA JPL Center Innovation Fund (CIF) used to established OSU/NASA-JPL research collaboration to continue development of ACRobot. Used NASA CIF to lead the development of DISL’s rapid prototyping lab (installed 3D printers, laser cutter, CNC mill, shape deposition manufacturing (SDM) lab, and machining/electronics tools)
