Design Principles for 3D Agility and Virtual Compliance
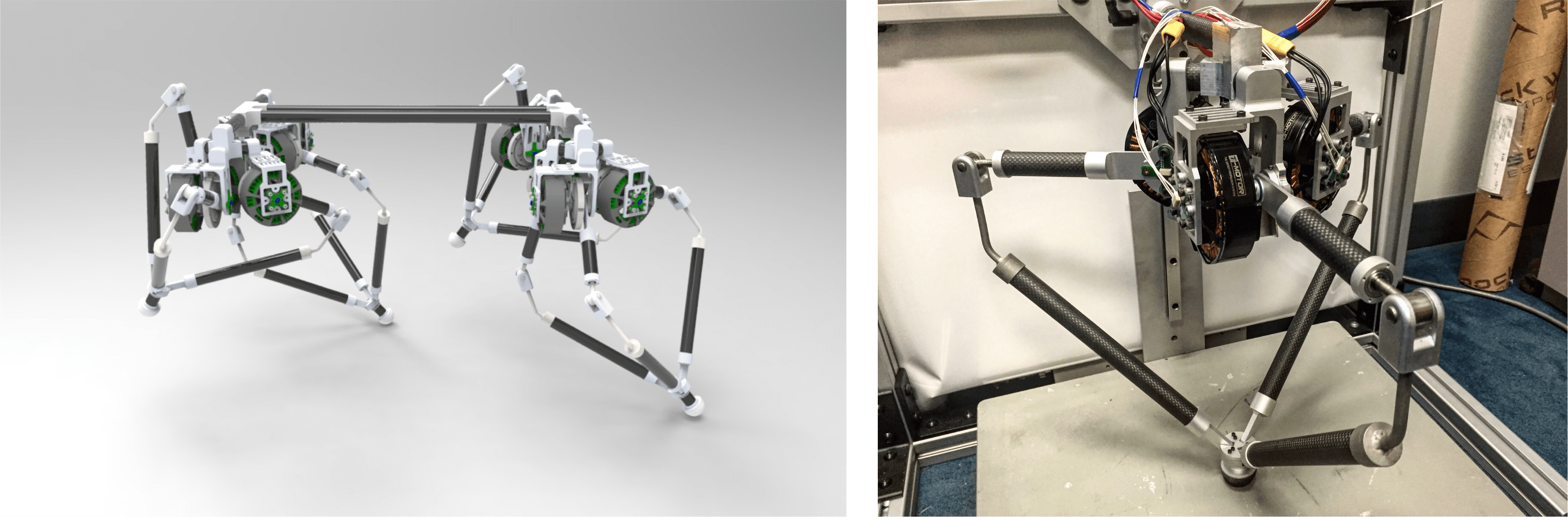
Creator of the GOAT leg (gearless, omni-directional, acceleration-vectoring topology), a highly dynamic omni-directional jumping and running robot designed for unparalleled 3D agility.
GOAT is a novel 3-DoF, 3-RSR, parallel leg topology which uses custom direct-drive (or quasi-direct-drive) actuators and proprioceptive force sensing to achieve high fidelity virtual compliance.
Masters Thesis: Design for 3D Agility and Virtual Compliance using Proprioceptive Force Control in Dynamic Legged Robots
IROS 2017 Conference Paper: GOAT: A Legged Robot with 3D Agility and Virtual Compliance