Control of legged robots using modular series-elastic actuators
Developed compliant, force-based, walking controller for Snake Monster, a reconfigurable, multi-modal, mobile-manipulation, legged robot (hexapod /quadruped /biped) that uses modular series-elastic actuators.
Morphologies/Configurations:
Snake Monster is featured on CNET, Reuters, IEEE Spectrum, Wevolver and more.
Conference paper: Awarded Best Applied Paper at SSRR 2015
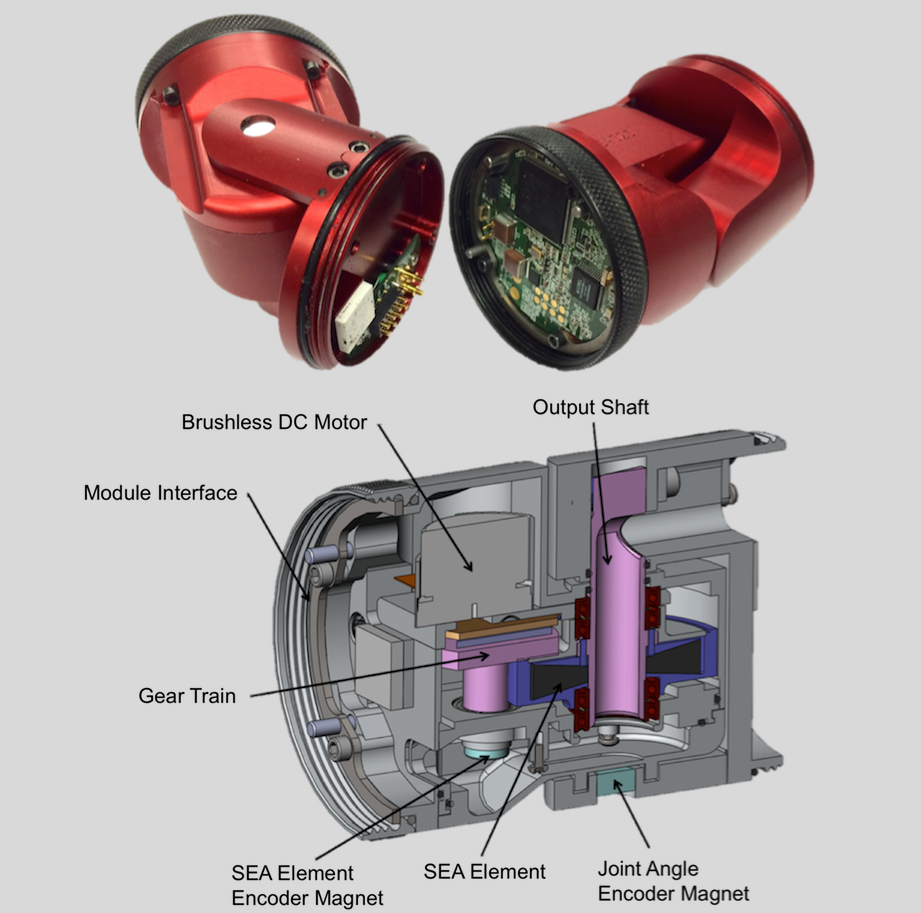
Hebi Robotics: Product Development of Series-elastic actuators
Responsible for the complete build of 40 series-elastic modular actuators. This includes everything from drafting GD&T drawings, to working with and getting quotes from vendors, to machining and swaging custom parts, to final assembly