t_codeTikhonovRidge
Explain Tikhonov regularizer (ridge, regression)
Implementation is based on wikipedia and other stuff we know.
https://en.wikipedia.org/wiki/Ridge_regression#Tikhonov_regularization
This explains the calculation when we solve b = Ax, subject to different constraints ('min norm',lambda) or ('smooth',lambda)
x = ieTikhonov(A,b,varargin);
Contents
Consider an ordinary linear equation
b = Ax
% Here is an example. Underconstrained equation A = rand(20,10); % 20 x 10 matrix b = rand(20,1); % Predict 20 numbers x = A\b; % Only 10 free parameters bhat = A*x; % The predicted value of b
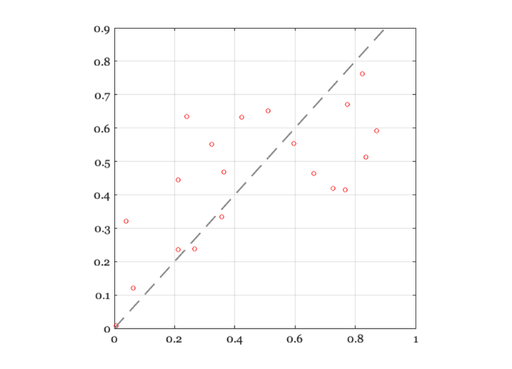
This is how much we miss with ordinary least squares
ieNewGraphWin; plot(b(:),bhat(:),'o'); identityLine; axis square; norm(b - A*x )
ans =
0.9339
This is what x looks like
The Tikhonov regression
Find a shorter solution, x. How much do we care? lambda
x = argmin b-Ax^2 + lambda*|x|^2
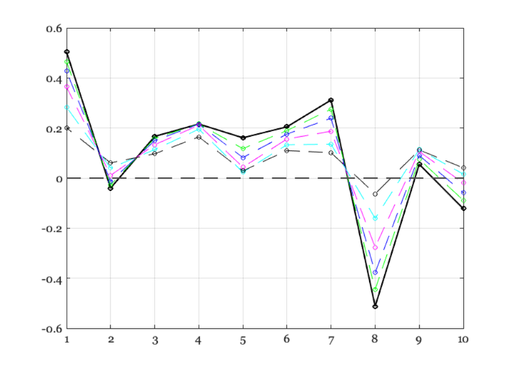
% The closed form Tikhonov solution. Notice that the curves shrink % towards the y = 0 line, making the solution vector length smaller. The % error gets larger as lambda gets larger. ieNewGraphWin; plot(x,'-ko','LineWidth',2); hold on; for lambda = logspace(-1,0.5,5) xR = inv(A'*A + lambda*eye(size(A,2))) * A' * b; plot(xR,'--o'); fprintf('Err %.2f Mag %.2f\n',norm(b - A*xR),norm(xR)); end xaxisLine;
Err 0.94 Mag 0.79 Err 0.95 Mag 0.71 Err 0.98 Mag 0.59 Err 1.04 Mag 0.46 Err 1.12 Mag 0.35
Smoother solutions
% We can use an alternative regularizer to impose a different % constraint on the solution, x. We might like a smoothness % constraint, say to mimize the magnitude of the 2nd derivative. % % x = argmin |b - Ax|^2 + lambda*|D2*x|^2 % In this case, D is the first derivative operator expressed as a matrix, sometimes % called the difference operator. % There is a direct solution for this case D2 = diff(eye(size(A,2)), 2); % Second-order finite difference matrix
The sum of the terms is how chatGPT put it.
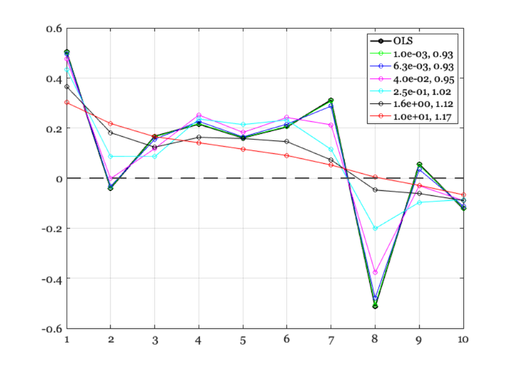
lgn = cell(1,7); % We want it smooth, but we do not care if it has a smaller norm. We set % lambda to 1 (ignore it). ieNewGraphWin; plot(x,'-ko','LineWidth',2); ii = 1; lgn{1} = 'OLS'; for lambda2 = logspace(-3,1,6) xD = inv(A'*A + eye(size(A,2)) + lambda2*(D2'*D2)) * A' * b; hold on; p = plot(xD,'-o'); % lgn{ii} = sprintf('%.1f',norm(b - A*xD)); ii = ii+1; lgn{ii} = sprintf('%.1e, %.2f',lambda2, norm(b-A*xD)); % norm(b - A*xD) end xaxisLine; legend(lgn);
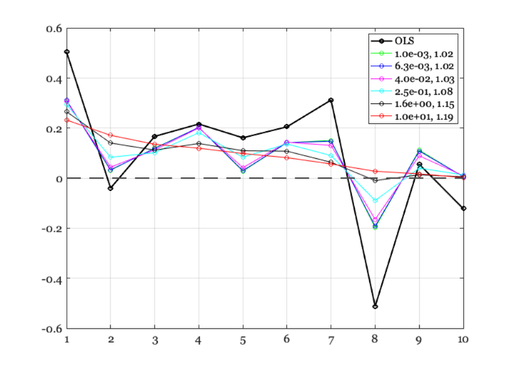
The wikipedia formula
% We want it smooth, but we do not care if it has a smaller norm. ieNewGraphWin; plot(x,'-ko','LineWidth',2); ii = 1; lgn{1} = 'OLS'; for lambda2 = logspace(-3,1,6) xD = inv(A'*A + lambda2*(D2'*D2)) * (A' * b); %#ok<*MINV> hold on; p = plot(xD,'-o'); % lgn{ii} = sprintf('%.1f',norm(b - A*xD)); ii = ii+1; lgn{ii} = sprintf('%.1e, %.2f',lambda2, norm(b-A*xD)); % norm(b - A*xD) end xaxisLine; legend(lgn); % Computational efficiency trick from Haomiao. % % By SVD, we can avoid the matrix inversion and estimate the % coefficients as % [U, S, V'] = svd(A); % s = diag(S); % x = V * diag(s./(s.^2 + lambda))*U'*b %}