t_ipDemosaic
Illustrate calls to different demosaicing methods. Does this with the camera method. Illustrating the actions in the critical image processing 'Demosaic'.
Wandell, July, 2019
Contents
ieInit
If setting ip method by hand, do this
scene = sceneCreate; oi = oiCreate; sensor = sensorCreate; ip = ipCreate; oi = oiCompute(oi,scene); sensor = sensorCompute(sensor,oi); ip = ipSet(ip,'demosaic method','bilinear'); ip = ipCompute(ip,sensor); ipWindow(ip);
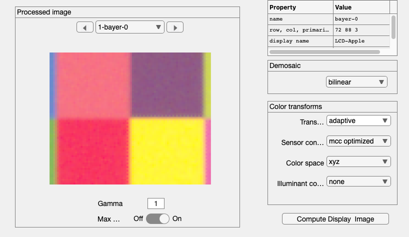
Here is the way to do it with the camera object
% This is the Demosaic call from inside of ipCompute (called also by % cameraCompute). In this illustration, there is no sensor or illuminant % correction fprintf('Demosaic method: %s\n',ipGet(ip,'demosaic method')); d = Demosaic(ip,sensor); ieNewGraphWin; imagescRGB(d);
Demosaic method: bilinear

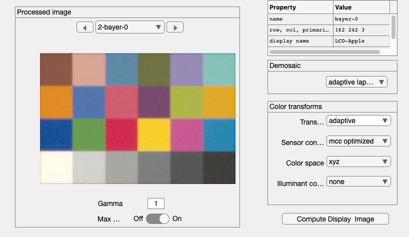
Alternative demosaicing method
camera = cameraCreate; camera = cameraCompute(camera,scene); camera = cameraSet(camera,'ip demosaic method','adaptive laplacian'); camera = cameraCompute(camera,scene); cameraWindow(camera,'ip');
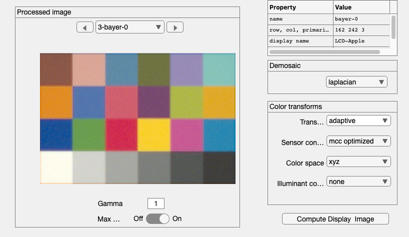
Camera from default oi,sensor and ip
camera = cameraSet(camera,'ip demosaic method','laplacian'); camera = cameraCompute(camera,scene); cameraWindow(camera,'ip');
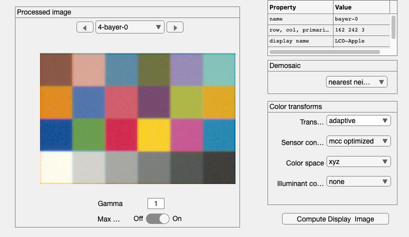
camera = cameraSet(camera,'ip demosaic method','nearest neighbor'); camera = cameraCompute(camera,scene); cameraWindow(camera,'ip');
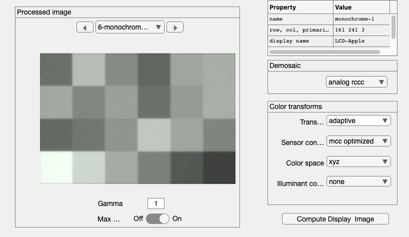
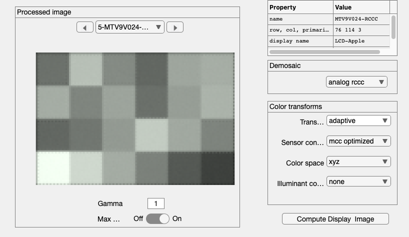
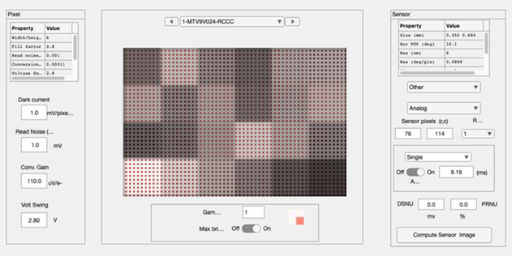
A special case for ans RCCC automotive sensor demosaic'd into a monochrome image
sensor = sensorCreate('MT9V024',[],'rccc'); camera = cameraSet(camera,'sensor',sensor); camera = cameraSet(camera,'ip demosaic method','analog rccc'); camera = cameraCompute(camera,scene); cameraWindow(camera,'sensor'); cameraWindow(camera,'ip')
ans =
struct with fields:
name: 'MTV9V024-RCCC'
type: 'vcimage'
spectrum: [1×1 struct]
metadata: []
data: [1×1 struct]
display: [1×1 struct]
transformMethod: 'adaptive'
demosaic: [1×1 struct]
illuminantCorrection: [1×1 struct]
internalCS: 'XYZ'
sensorCorrection: [1×1 struct]
render: [1×1 struct]
For monochrome, Demosaic does nothing.
scene = sceneCreate; sensor = sensorCreate('monochrome'); camera = cameraSet(camera,'sensor',sensor); camera = cameraCompute(camera,scene); cameraWindow(camera,'ip')
ans =
struct with fields:
name: 'monochrome-1'
type: 'vcimage'
spectrum: [1×1 struct]
metadata: []
data: [1×1 struct]
display: [1×1 struct]
transformMethod: 'adaptive'
demosaic: [1×1 struct]
illuminantCorrection: [1×1 struct]
internalCS: 'XYZ'
sensorCorrection: [1×1 struct]
render: [1×1 struct]