Structure Design
The structure of this robot consists of 5 main parts:
- Main Structure – this part is composed of two 22cm diameter round board (serve as the upper & lower plate), connected by four thread rods. This is the main structure of the robot, holding and carrying all parts together.
- Controller – we use Arduino UNO as the controller of the robot, and use L293B as the driver for the motors. Both boards are placed on the upper plate. Arduino is connected to all the subsystems listed below.
- Driving System – this subsystem includes the motors, encoders, wheels, and their holders, which locates on the lower plate.
- Sensing system – this subsystem includes all the sensors we used (IR sensor, ultrasonic sensor, and bumping sensor), their circuits, and their holders. The circuit board and Arduino locate on the upper plate, while the sensors are scattering around in each of their working positions.
- Dumping system – this subsystems is designed for dumping tokens into the buckets, and is composed of a server motor and a dumping arm. The arm is locked on the server motor, and they are placed on a smaller sub-plate above the upper plate of the main structure.
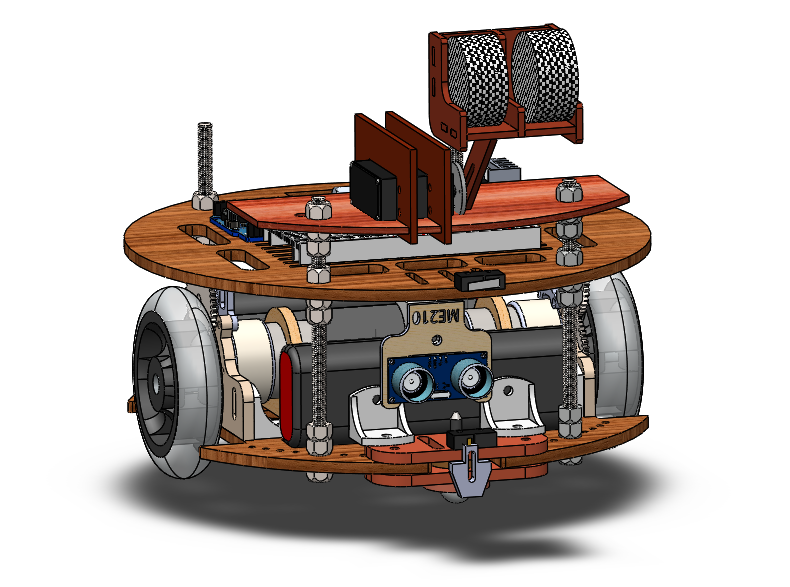
CAD MODEL
The robot CAD model was made with Solidworks 2015. The renderings were made using Keyshot5.0.

DRIVING SYSTEM
We used two wheel drive system with two extra support ball rollers to enchance the mobility of the robot. The DC motors on our robot are JAMECO 161382, with the rated load(850g-cm) and the current cannot exceed 306mA at 12V. The motor driver we used is L298 H-Bridge and we used arduino to control the direction and enable pin. |

|

|


|
DUMPING SYSTEM
To put the chips into the buckets, we designed an arm with a basket on the tip and attached it to a server motor. The server motor keeps the arm raised for most of the time (running & chip-loading), and will tilt the arm down whenever it is to dump the chips into the buckets (controlled by Arduino).
|

|
ENCODER ASSEMBLYTo improve the precision of control, we added two encoders on each side of the wheel. Instead of attaching the encoder to the motor shaft directly, we made a compact 1:1 spur gear box to transmit
|

|

|

|

|
CIRCUIT LAYER (upper plate)
The upper plate is loaded with our main circuits and controllers. |

|