
SCPA Prototype with NASA Ames K9 Rover
Rover Navigation
One of the many challenging problems facing designers of planetary rovers and other autonomous vehicles is that of navigation. A robot vehicle must generally have a reasonably good idea of where it is and where it is going in order to complete its intended mission. This is especially critical for rovers on other planetary bodies such as Mars. Due to the communications time delay and the hostile environment, it is highly undesirable for the ground controllers on Earth to regularly intervene to correct the rover navigation. These delays can eat up much of a rover's useful life and jeopardize the success of its mission.
Sojourner, the rover on Mars Pathfinder, employed a simple dead-reckoning navigation system. Every Sol ground controllers updated the estimated rover position using stereo vision information from the lander. Future rover, such as the 2003 Athena rover, will require navigation systems with greatly enhanced capabilities. This will be accomplished through a variety of technologies including landmark-based vision, star-tracking/celestial navigation, and GPS.
Self-Calibrating Pseudolite Arrays
There are currently no plans by NASA to place a full GPS system around Mars. It is possible to use GPS in a local area using small ground-based GPS transmitters called pseudolites (pseudo-satellites). A disadvantage with this approach is that all previous work with pseudolites required that the pseudolite locations be known to centimeter-level accuracy. This is unlikely when placing the devices on another planet.
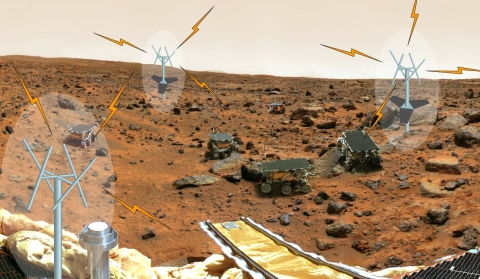
Self-Calibrating Pseudolite Array
To solve this problem, the ARL is developing a new GPS navigation system called a Self-Calibrating Pseudolite Array (SCPA). This array consists of several GPS pseudolites and receivers communicating amongst themselves using GPS signals. This allows the pseudolites to determine their own position relative to the each other with centimeter-level accuracy. Once the positions are accurately known, any vehicle can navigate within the array as it would with conventional pseudolites.
Research Focus
The GPS work being done at Stanford is part of a larger effort to improve rover navigaiton technologies. NASA Ames Research Center is continuing to develop the visual servoing technologies used on Soujourner, while Carnegie Mellon University is developing a landmark-based navigation system and an improved star-tracking reference database. These and other technologies will then be combined to develop a superior integrated navigation system for future rover missions.
Last modified Mon, 1 Nov, 2010 at 14:42