Motivation
Introduction
Robotic exploration of remote environments often involves a video survey of scientifically-interesting sites, where the robot is tasked with providing complete video coverage of the sites. These video surveys are made challenging by the lack of reliable sensor data during remote exploration tasks, hampering robot navigation and hindering complete video coverage. The real-time mosaicking project aims to aid remote video surveys by building in real-time a navigation grade map (mosaic) of the survey area and using the map to correct unreliable sensor data. This project aims to perform video surveys of terrain in the benthic environment (sea-floor) of Monterey Bay. The Monterey Bay Aquarium Research Institute (MBARI) owns a set of Remotely-Operated Vehicles (ROVs) that can operate in the benthic environment, and the ROVs contain a suite of sensors that are used for navigation:
| sensor | measurement |
|---|---|
| Doppler Velocity Log (DVL) | Inertial vehicle velocity over sea floor. Integrated velocity provides vehicle position. |
| Fiber-Optic Gyro | Vehicle attitude and angular rates |
| Ultra-Short Baseline Array (USBL) | Geo-referenced position. Noisy with low update rate |
The table shows that the ROV lacks sensors accurate enough to perform large scale navigation over the sea-floor. The USBL's position measurement cannot be used due to its low bandwidth and high noise, and the DVL's integrated position measurement is subject to drift. However, creating a mosaic of the benthic environment in real-time offers us additional information that can be used to improve the ROV's position measurement such that complete video coverage of a site can be guaranteed.
The video mosaicking system has successfully been used to survey nearly planar benthic sites, such as the rubble field of the USS Macon airship (above). The system is currently being extended to operate on sites that contain gentle curvature, yet look planar in the camera's view. A key issue in the extension lies in the vehicle navigation, and in particular, how to choose a ROV orientation that will point the camera perpendicular to the non-planar terrain.
 |
Sample navigational-grade mosaic of benthic terrain |
Current Work
The video mosaicking system has successfully been used to survey nearly planar benthic sites, such as the rubble field of the USS Macon airship (above). The system is currently being extended to operate on sites that contain gentle curvature, yet look planar in the camera's view. A key issue in the extension lies in the vehicle navigation, and in particular, how to choose a ROV orientation that will point the camera perpendicular to the non-planar terrain.
Video Mosaic Creation
Real-Time Visual Processing
Navigation grade mosaics of nearly planar surfaces are created by tiling many individual images of the terrain. The tile-to-tile offsets are computed in real-time using a visual processing algorithm involving 2-D image texture correlation. At 5 Hz, the live image from the camera feed is fed through a Signum Laplacian over Gaussian (SLoG) filter to create a binary image representative of the image's texture. The SLoG-ed live image is then 2-D correlated with a SLoG-ed version of a reference image, and an image-to-image offset is computed in pixels. Once the live image has moved a certain number of pixels from the reference image, the live image is stored as the new reference image. The series of reference images and their associated location offsets can be displayed as a mosaic.

Depiction of mosaicking texture correlation algorithm
Global Mosaic Correction
As reference images are added to the mosaic, errors in computing tile-to-tile offsets accumulate to create large global errors. Even when images are tiled based on the (more accurate) DVL position measurement, the measurement is subject to drift and results in global errors. To correct for these global errors, an additional visual processing step is added to mosaic creation. Non-sequential but overlapping reference images from the mosaic are run through additional texture correlation to provide more information on the tile locations. The additional information is then used to globally correct the tile locations, and the updated tile locations are used to correct the DVL vehicle position estimate. The updated tile locations are also used to determine the regions of the terrain that have been surveyed in order to guarantee complete terrain coverage at survey's end. To maximize the acquisition of additional information via texture correlation, a lawnmower pattern trajectory is driven over the planar terrain. After every swath of the lawnmower pattern, the images in the swath are correlated with the closest image in the last swath, yielding the formation of "side-to-side" links.
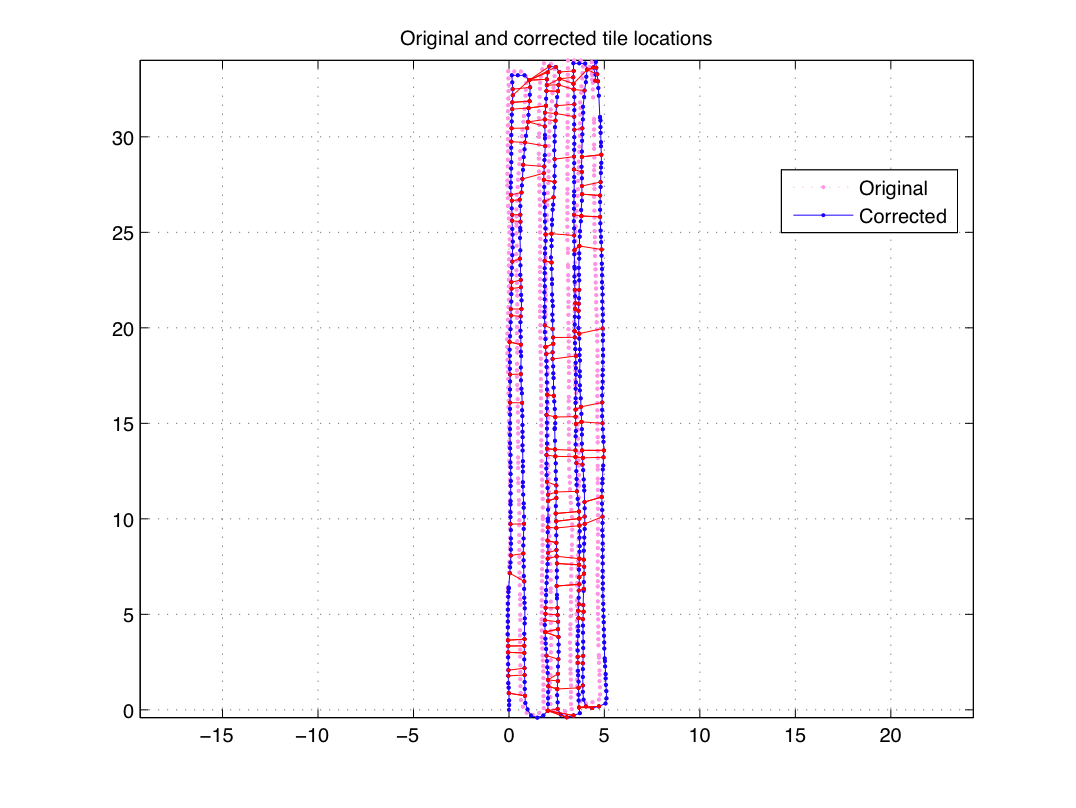 Tile locations in lawnmower pattern with side-to-side links shown in red. The tile locations before and after global correction as shown.
Tile locations in lawnmower pattern with side-to-side links shown in red. The tile locations before and after global correction as shown.
Current Work: Benthic Navigation
The video survey benthic navigation algorithm focuses on providing two pieces of information in real-time:
- Terrain-relative vehicle position estimate
- Camera orientation command that points the camera (ideally) perpendicular to the terrain to minimize perspective distortion in the mosaic's images
The navigation information is subsequently corrected by using the information from the global mosaic correction step.
Navigation Over Planar Terrain
Over planar terrain, the ROV can easily calculate the two required pieces of navigation information:
- Terrain-relative position: Integrate DVL velocities in the plane of interest
- Camera orientation command: Hold fixed orientation while driving lawnmower pattern
Navigation Over Non-Planar Terrain
- Terrain-relative position: With the terrain taking an arbitrary shape, terrain-relative navigation methods must be used to discern the terrain-relative vehicle position
- Camera orientation command: The camera must change orientation as the vehicle traverses the terrain. One way to perform this task is to sense the terrain's orientation by fitting a plane to range measurements of the terrain. However, high spatial frequency content in the terrain (rocks, divots, etc.) leads to undesirable qualities in the camera orientation command:
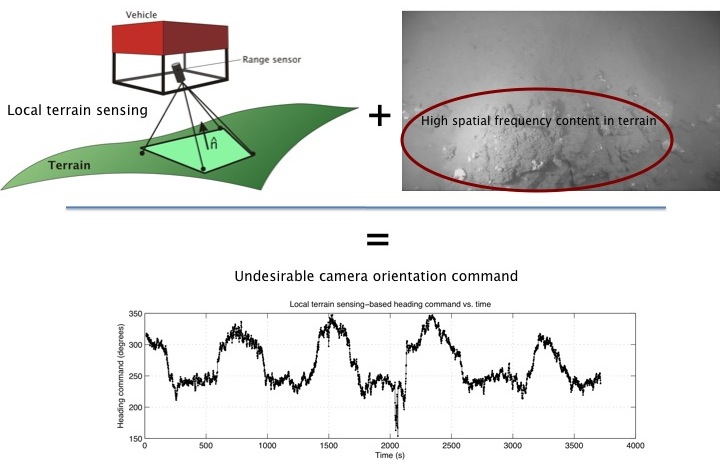
These undesirable qualities make it difficult to smoothly track the local terrain sensing-based camera orientation command. One way to condition the data to create a smooth camera orientation command is to employ spatial filtering techniques, where local terrain measurements are incorporated into a smooth spline surface model of the terrain. This smooth terrain model can then directly generate a smooth camera orientation command.
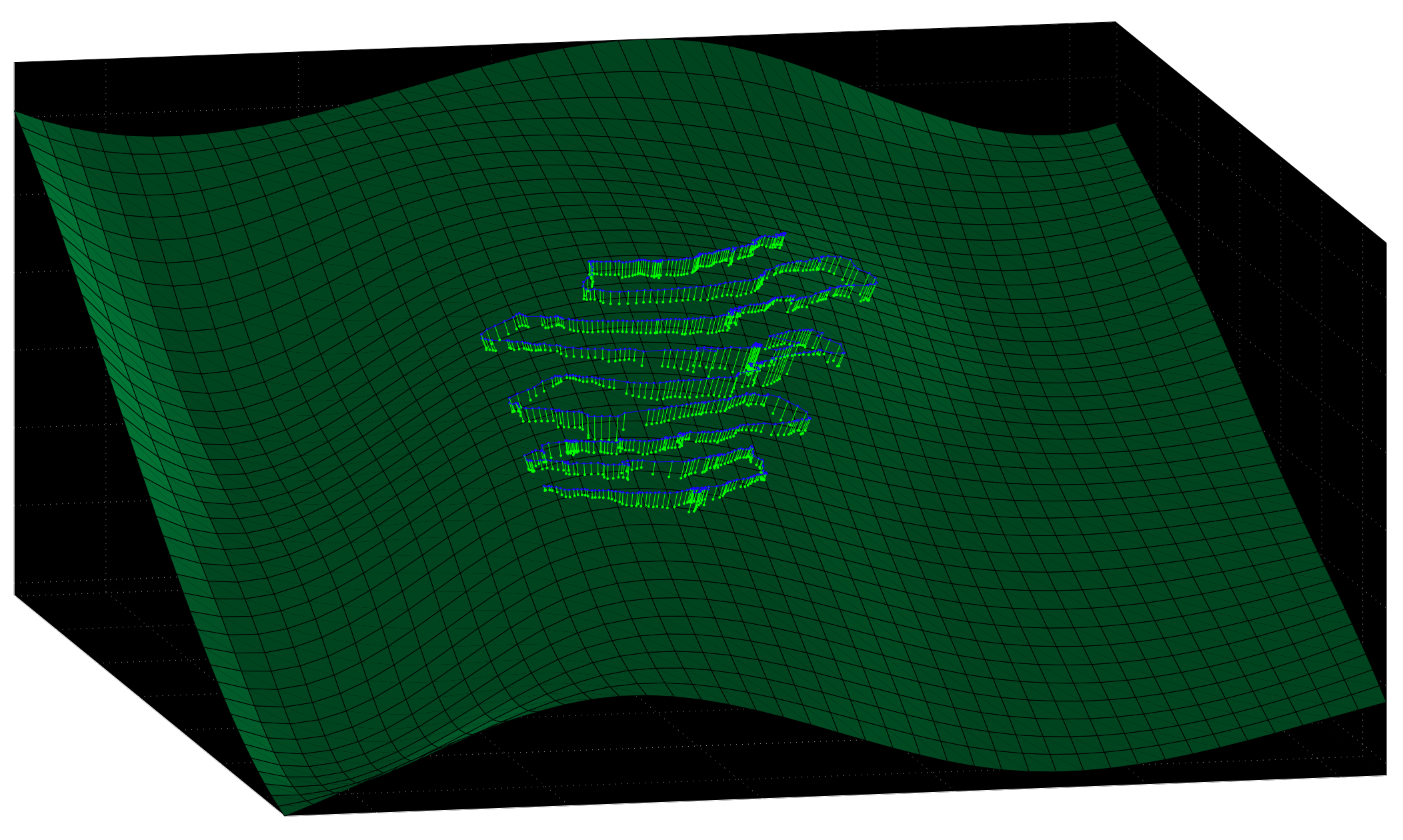 |
Vehicle trajectory (blue) over spline surface-based model of terrain created by fusing a priori bathymetry data and local terrain measurements. The green lines denote the camera orientation commands at each vehicle position. |
 |
Smooth spline terrain model-derived camera heading command (blue) with undesirable local terrain sensing-based camera heading command (black). |
Associated Personnel
Related Publications
Last modified Mon, 15 Nov, 2010 at 17:28