A MICROSURGERY-SPECIFIC HAPTIC DEVICE FOR TELEROBOTIC MEDICAL TREATMENT

The purpose of this project was to design a new six degree of freedom haptic device, the µHaptic device, with microsurgical telerobotics and simulation in mind. We presume that the passive mass properties of a telerobotic master device should closely approximate the mass properties of real surgical instruments in order to maximize transfer of the surgical motor skill. The objective of the design effort was to exploit the small workspace common to mircosurgery for the minimization of device mass properties.
Telerobots consist of a master and a slave robot. In surgery, the surgeon directly controls the master which results in motion by the slave at the patient. Well designed telerobotic masters are intuitive to use, and in cases where extensive device-specific training is undesirable, the interface should immerse the surgeon in an environment very similar to that found in a conventional procedure. The requirements for effective immersion vary from procedure to procedure. Some procedures require crisp, realistic graphics, others require high bandwidth haptics, and others require audio feedback. Microsurgery has a particular need for low-inertia, high-bandwidth haptics. This is due in part to the low inertia of microsurgical tools and in part to the subtle, high-frequency haptic cues used for navigation.
DESIGN REQUIREMENTS
Position trajectory data of a surgical drill tip were collected during two separate procedures. After analyzing the workspace in which the tools interact with the patient, a 7.5 cm diameter sphere seemed to be an appropriate requirement.
In order to determine the inertial properties of the various surgical instruments, a sample of common tools was weighed. A survey of some existing 6DOF haptic devices is also shown for comparison. The force values represent the maximum and continuous force output capabilities respectively. Note both the large workspaces and the large inertia, relative to the mass of microsurgical tools.
| Tool | Mass (g) |
| Small Scissors | 7 |
| Pick | 8-13 |
| Suction | 10 |
| Electrocautery Knife | 15 |
| Normal Scissors | 17 |
| Drill | 100 |
| Product | Range (cm) | Force (N) | Friction (N) | Inertia (g) |
| Phantom 1.5 6-DOF | 20, 27, 38 | 8.4, 1.4 | 0.04 | 136 |
| MPB Freedom6 | 13, 16, 18 | 2.5, 0.6 | 0.04 | 125 |
| µHaptic Device | 7.5, 7.5, 15 | 4.6, 0.5 | 0.05 | 21 |
To determine the force requirements, we refer to prior work in this area as well as feedback from our surgeons. Studies have reported experimentally determined force requirements for microsurgery to be less than 1 N, which is consistent with drilling force loads on an eggshell intending to represent otological anatomy. Surgeons who use the Stanford Microsurgery Simulator indicate that while these loads are sufficient for most interactions, the initial interaction of bringing the drill to the bone requires higher haptic force capability to prevent the surgeon from pushing through the virtual anatomy. Forces larger than 3 N are required in these instances. The design objective for this device was approximately 5 N.
DEVICE DESIGN
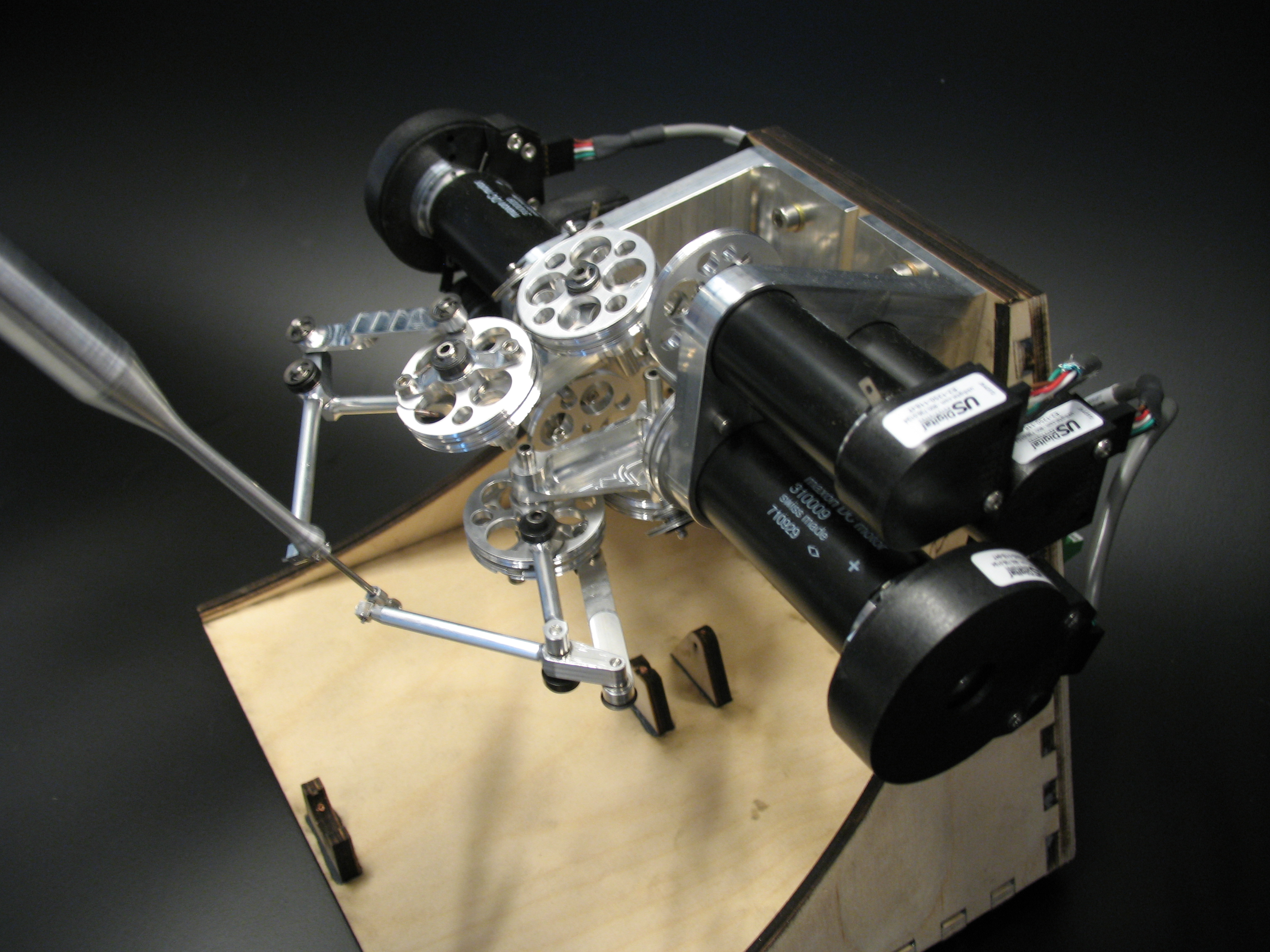
The μHaptic device consists of two serial RRR manipulators joined at the effector (Fig. 2). Figure 3 contains a CAD model of the device for clarity. Par- allel mechanisms exibit exceptional stiffness and low inertia for a given desired force output. Serial mech- anisms exibit exceptional range of motion and mini- mal workspace intrusion. The hybrid kinematic de- sign of this device which contains both parallel and serial mechanisms was judged to provide a favorable balance between stiffness, inertia, range of motion, and workspace intrusion.
Each serial mechanism has 3 fully actuated degrees of freedom. When the mechanisms are attached via a stylus, the combined system can actuate 5 degrees of freedom. The 6th degree of freedom is actuated by a motor inside of the stylus. The additional actuator eliminates a planar singularity that would otherwise exist.
DEVICE ANALYSIS
Force output capability of the µHaptic device was determined by considering a force rendered along any arbitrary direction. The maximum force output along a given direction is the highest force that can be commanded without any of the motors saturating. Torque capability was determined in exactly the same way. Maximum force and torque output for arbitrary directions are plotted below. Notice that the surface has 12 facets: each facet corresponds to one of the 6 large motors in either forward or reverse saturation.
The mass properties of the µHaptic device are calculated at the center of the stylus in the nominal position and excludes the mass of the stylus. The mass properties can be deduced from the kinetic energy matrix of the device. The is generated by summing the kenetic energy matrices from the two serial links. The mass properties range from a few grams to a maximum of 21 grams, as shown in the belted ellipsoid plot on the right.
CONCLUSION
A haptic device for microsurgery was designed and built. This device took advantage of the 7.5 cm spherical workspace observed to be sufficient for microsurgery to deliver an effective inertia of 21 g, while providing at least 4.6 N of peak force in every direction. This was accomplished by direct driving motors with low rotor inertia through a cable drive transmisSion and two serial mechanisms attached at the device stylus. It is hypothesized that this haptic device will be more conducive to skill transfer of the surgeon’s skills to this telerobotic master. Now that a test platform has been built, follow-on work will attempt to validate this hypothesis.
Project Staff
- Curt Salisbury
- Cédric Schwab
- Francois Conti
- J. Kenneth Salisbury
Status
Active since 2007.