
Team Co-Founder: Autonomous Balancing Using CMGs
Wrote and submitted a technical/business proposal for contract with the U.S. Air Force Research Lab. Awarded $250,000 for the Special Ops transport Challenge
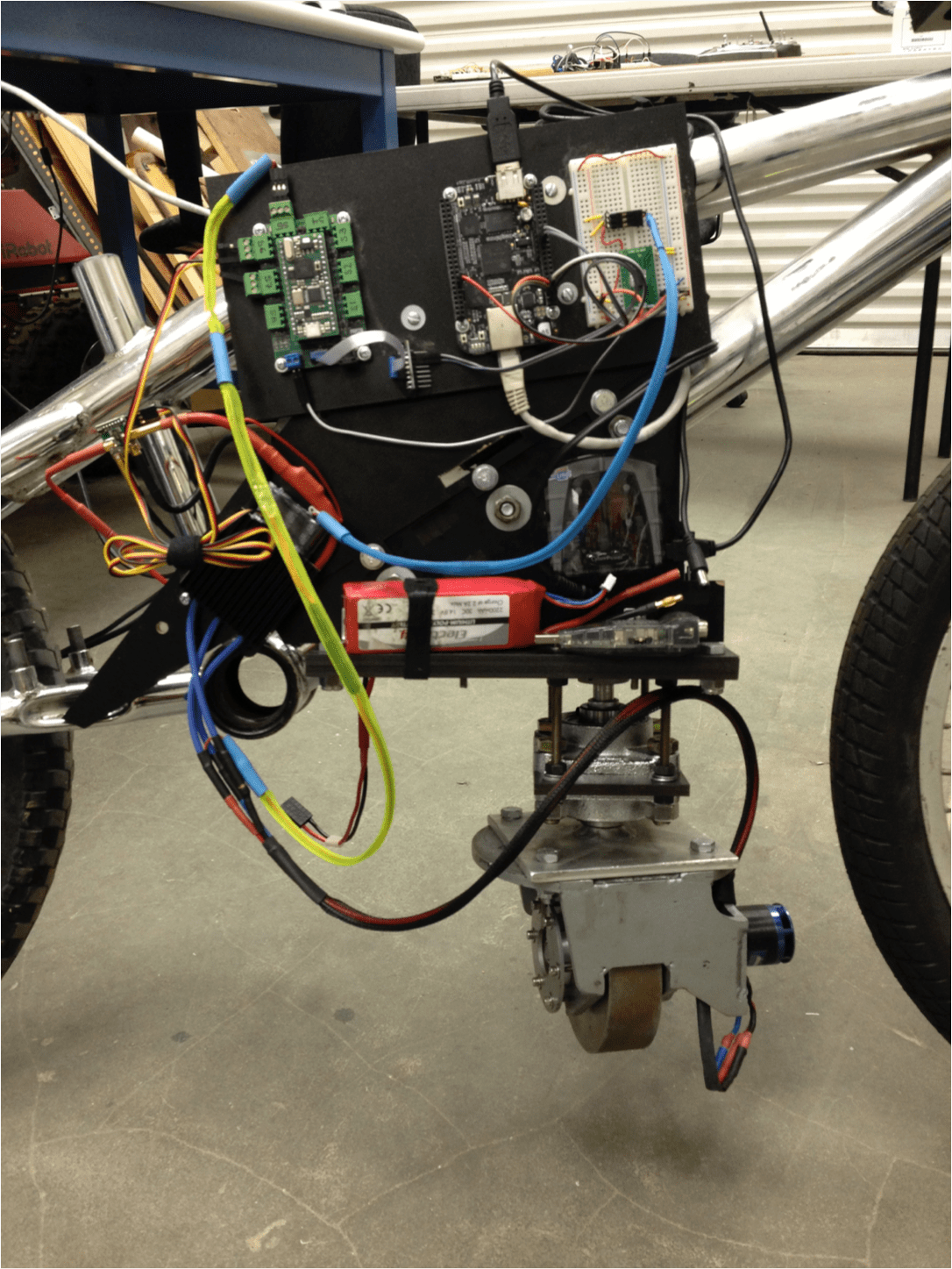
Designed & built a 1/3 scale prototype vehicle capable traversing mountainous terrain. Vehicle design incorporates (patent-pending) dual, multi-axis, control momentum gyroscope (CMG) stabilization system, projected to out perform current off-road vehicles. Designed a single-axis-gimbal CMG and mounting hardware for a bicycle. Developed PID and sliding mode controllers for autonomous bicycle balancing, stabilization, & advanced maneuvers (e.g. turning,wheelies)
Undergraduate Research Thesis: CMG Stabilization and Maneuverability of Inherently Unstable Vehicles & Mobile Robots
ACC Paper: Gyroscopic Stabilization of an Unmanned Bicycle