



Samir Menon
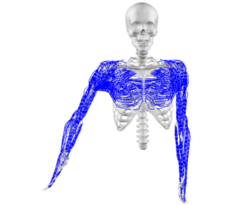
I am presently working to understand and model neural control of the musculoskeletal system.
I am also working on a finitist computational mathematics formulation, with a specific focus on
modeling the process of computation and control in mixed-mode analog-digital systems.
Such systems include robots, neuromorphic computers, and the human brain.
Earlier, I earned a Ph.D. in Computer Science
at Stanford University, where I was co-advised by
Oussama Khatib and
Kwabena Boahen.
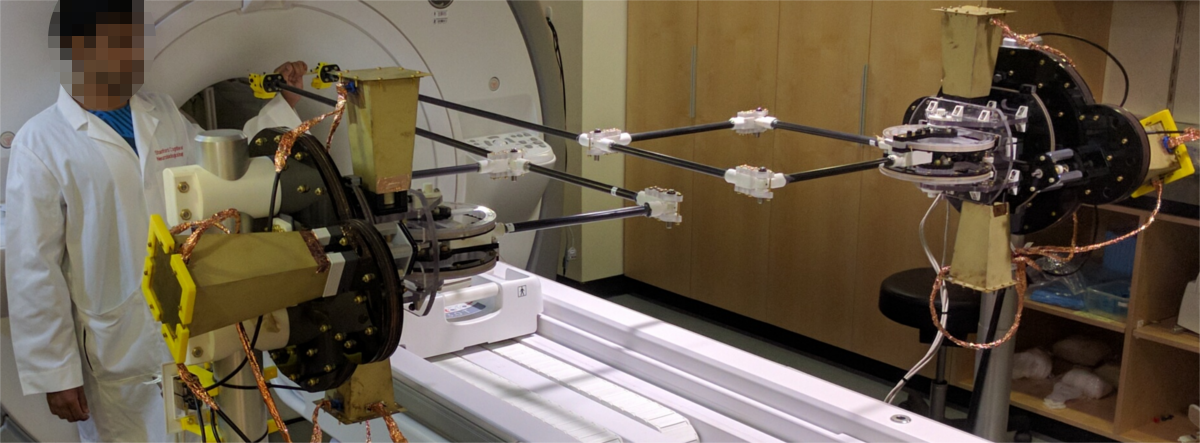
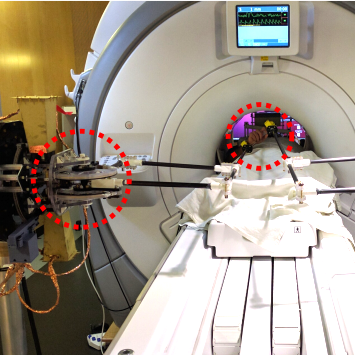
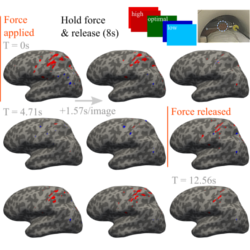
My research involved applying insights from humanoid robotics to predict how the brain should
coordinate multiple tasks, and using functional magnetic resonance imaging to identify the brain
regions responsible.
Before that, I worked as a Software Design Engineer with Microsoft
India R&D.
Before before that, I was an undergraduate at the Indian Institute of
Information Technology, Allahabad where I earned a Bachelors in Technology in Information Technology.
You may also find me on the Manips Lab, the
Brains in Silicon Lab, and the
Bio-X Graduate Fellowship pages.

Events and Updates

Organizer: Stanford Math Foundations Seminar '17

General Co-chair:
SIMPAR'16

Organizer: WMMHC
Workshop at Humanoids'15

Organizer: HNN
Workshop at ICRA'15

Organizer: Stanford
Robotics Seminar, Fall'14

Organizer: Stanford
Robotics Seminar, Spr'14

Peer-Reviewed Publications

 Bibtex
Bibtex
 Bibtex
Bibtex
 Bibtex
Bibtex
 Bibtex
Bibtex
 Bibtex
Bibtex
 Bibtex
Bibtex
 Bibtex
Bibtex

 Bibtex
Bibtex

Abstracts and Invited Talks
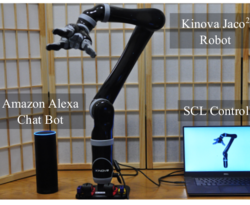
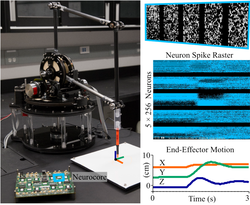
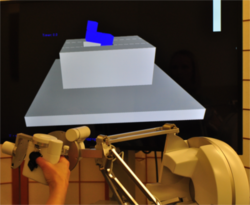
[2016] Menon. S, Sriram. V, Kumanduri. L, Khatib. O, Boahen. K, "Controlling a Redundant Articulated Robot in Task Space with Spiking Neurons", (Abstract; Poster), The 25th International Conference on Artificial Neural Networks, 2016.
Bibtex
[2014] Menon. S, "Controlling articulated bodies using redundant and non-negative muscle actuation", (Invited Talk), Workshop on Redundancy, inequalities, and the mathematical tools to address them at the Conference on Humanoid Robotics, 2014. [Link]
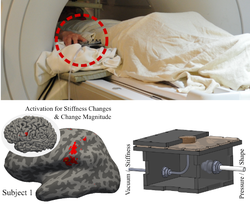
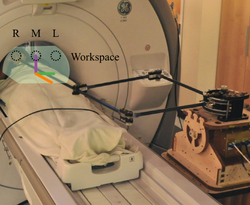
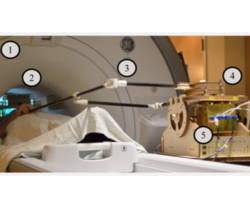
[2014] Menon. S, Yu. M, Ganti. H, Boahen. K, Khatib. O, "Haptic fMRI: Mapping neural activation during planning and reaching for unconstrained three degree-of-freedom tasks", (Abstract; Poster), 44th Annual Meeting of the Society for Neuroscience, 2014. Bibtex
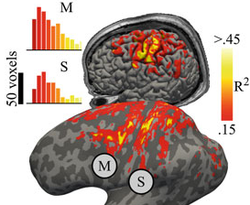
[2014] Menon. S, Zhu. J, Quigley. P, Boahen. K, Khatib. O, "Using fMRI to Characterize How Cortex Represents Limb Motions", (Abstract; Poster), 23rd Annual Computational Neuroscience Meeting, 2014. [BMC Neuroscience] Bibtex
[2013] Brantner. G, Menon. S, Schorpp. G, Khatib. O, "SVM-based Classification of Motor-Tasks On fMRI-BOLD Data", (Abstract; Poster), 6th International IEEE EMBS Conference on Neural Engineering, 2013 [IEEE]
Bibtex
[2011] Menon. S, Khatib. O, "Controlling Biomechanical Models To Move Like Human Do", (Abstract; Invited Talk), Biomechanical Engineering Conference at Stanford, 2011
Bibtex
Links
Blog: Musings on human motor control The Human Motor Control Blog.
Operational Space Control Math Tutorials: 3-dof and
6-dof chain robots.
Teaching: Course Assistant for CS223A Introduction to Robotics, and
CS327A Advanced Robotic Manipulation. 2010-11.
Standard Utilities (sUtil): Some random but useful C++ code. stl-style
indexed data structures, dynamic typing, template singletons and callback handlers.
Standard MRI Utilities (sMRIUtil):
Some useful scripts and code that I use for fMRI experiments and analysis. Also has some tidbits of information for new fMRI users.
The Standard Control Library (scl):
A control and simulation framework for robots and human biomechanical models. Includes operational space and joint space control libraries, multi-task
null space projections for controllers, and support for physical actuator and sensor models. (In the works, contact me if you'd like more details).