|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
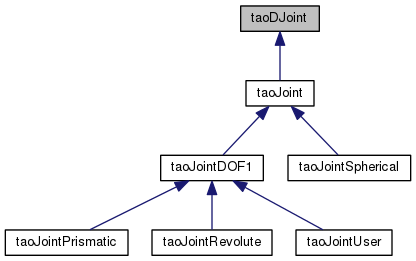
abstract joint class for articulated bodyThis class should be used as a base class and implemented accordingly. More...
#include <taoDJoint.h>
Public Member Functions | |
| virtual taoDVar * | getDVar ()=0 |
| virtual deFloat | getDamping ()=0 |
| virtual deFloat | getInertia ()=0 |
| virtual void | addQdelta ()=0 |
| virtual void | addDQdelta ()=0 |
| virtual void | zeroTau ()=0 |
Public Attributes | |
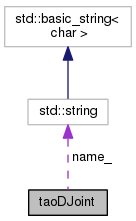
| std::string | name_ |
abstract joint class for articulated body
This class should be used as a base class and implemented accordingly.
NOTE TODO Samir > This class is useless! Delete it.
 1.8.6
1.8.6

