|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
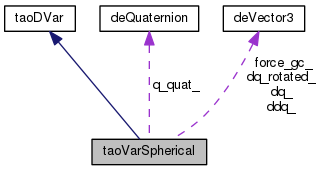
spherical joint variable class for articulated bodyThis provides joint variables necessary for articulated body dynamics. More...
#include <taoVar.h>
Public Attributes | |
| deQuaternion | q_quat_ |
| joint position More... | |
| deVector3 | dq_ |
| joint velocity in local frame More... | |
| deVector3 | ddq_ |
| joint acceleration More... | |
| deVector3 | force_gc_ |
| joint force (torque) More... | |
| deVector3 | dq_rotated_ |
| joint velocity in reference (parent) frame More... | |
spherical joint variable class for articulated body
This provides joint variables necessary for articulated body dynamics.
| deVector3 taoVarSpherical::ddq_ |
joint acceleration
| deVector3 taoVarSpherical::dq_ |
joint velocity in local frame
| deVector3 taoVarSpherical::dq_rotated_ |
joint velocity in reference (parent) frame
| deVector3 taoVarSpherical::force_gc_ |
joint force (torque)
| deQuaternion taoVarSpherical::q_quat_ |
joint position
 1.8.6
1.8.6

