|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
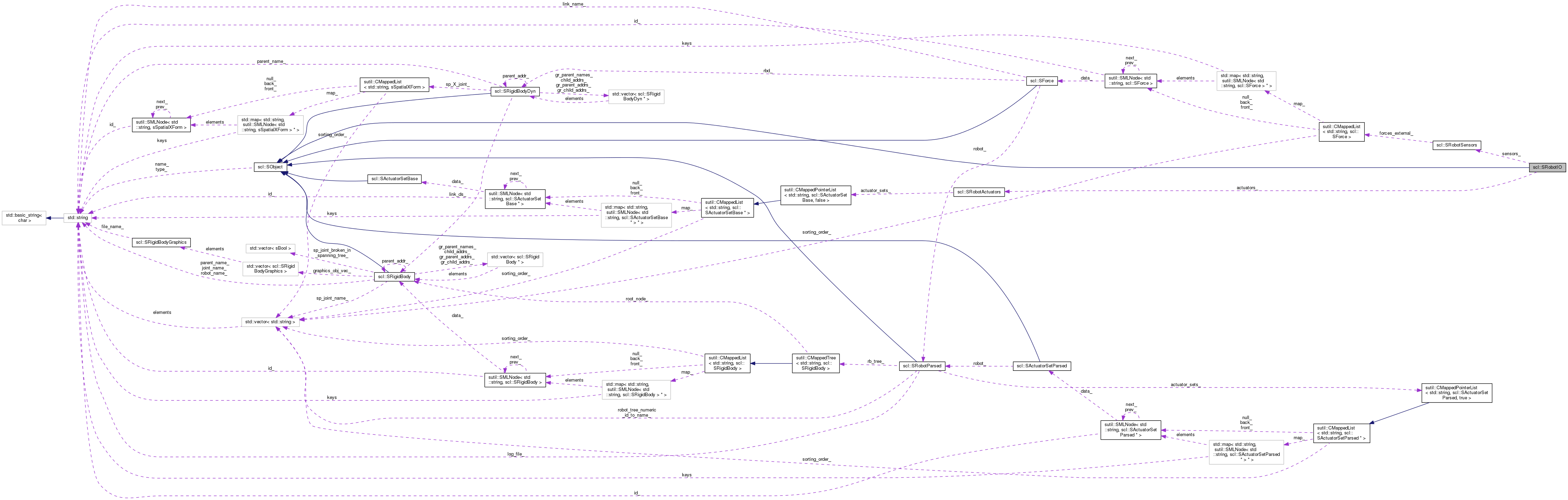
#include <SRobotIO.hpp>

Public Member Functions | |
| SRobotIO () | |
| sBool | init (const std::string &arg_robot_name, const sUInt arg_robot_dof) |
| void | setGcPosition (const Eigen::VectorXd &arg_pos) |
| void | setGcVelocity (const Eigen::VectorXd &arg_vel) |
| sBool | printInfo () |
| virtual const std::string & | getType () const |
| virtual const std::string & | getName () const |
| virtual bool | hasBeenInit () const |
Public Attributes | |
| sUInt | dof_ |
| SRobotSensors | sensors_ |
| SRobotActuators | actuators_ |
| std::string | name_ |
| sBool | has_been_init_ |
Protected Attributes | |
| std::string | type_ |
Wraps input (sensor) and output (actuator) data for a robot.
NOTE : Objects of this struct have the same name as their parent robot.
| scl::SRobotIO::SRobotIO | ( | ) |
Constructor
|
inlinevirtualinherited |
Get the object's type
|
inlinevirtualinherited |
Get the object's type
|
inlinevirtualinherited |
Get the object's type
| sBool scl::SRobotIO::init | ( | const std::string & | arg_robot_name, |
| const sUInt | arg_robot_dof | ||
| ) |
Initializes the io data structure
| sBool scl::SRobotIO::printInfo | ( | ) |
Prints all the robot info to the screen
|
inline |
Joint positions and velocities are necessary and sufficient to determine the system's state.
|
inline |
Joint positions and velocities are necessary and sufficient to determine the system's state.
| SRobotActuators scl::SRobotIO::actuators_ |
Stores the controller's and GUI's output to the real world (or simulation).
| sUInt scl::SRobotIO::dof_ |
The degrees of freedom of the robot that these sensors monitor
|
inherited |
Whether the object is ready for use
|
inherited |
The object's name
| SRobotSensors scl::SRobotIO::sensors_ |
Stores information from the real world (or simulation)
|
protectedinherited |
The object's type. Should only be set by the constructor
 1.8.6
1.8.6

