
RGB-D SLAM for MAV Autonomous Indoor Navigation
In recent years, micro-aerial-vehicles (MAVs) have gathered interests from different fields: surveillance, search and rescue, remote sensing and photography. However, most of such missions have been conducted outdoor where GPS data is available for localization and control. Maneuvering an MAV indoor autonomously, where GPS is unavailable, remains a challenging problem formulated as Simultaneous Localization and Mapping (SLAM). In this project, an RGB-D based visual odometry and pose graph optimization based SLAM is implemented on an MAVsystem. We also demonstrated the capability of it executing autonomous missions indoor. See Github repo for details and video demo.
SmartTree
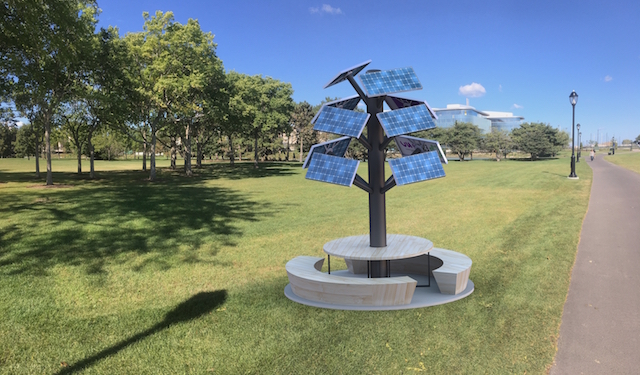
As a part of Engineers for a Sustainable World (ESW) at Northwestern, SmartTree is a student-run design project aimed to bring solar energy to Northwestern and get the community involved in sustainability. SmartTree provides a ‘trunk’ of solar-powered AC and USB outlets centered around a seating area, so anyone can bring his or her laptop or phone outside without having to worry about running low on battery. Having SmartTree on campus will not only allow students to best utilize technology outdoors, but also raise awareness for the potential solutions clean energy can bring to everyday life.
I led the design and construction of the electrical system, which consists of eight solar panels, maximum power point trackers (MPPTs), four 36V lead acid battery packs, battery management system and user interface, which includes AC and USB outlets and a screen that displays energy generated by the 'tree'. More detail about the design can be found in this repo.
PCB
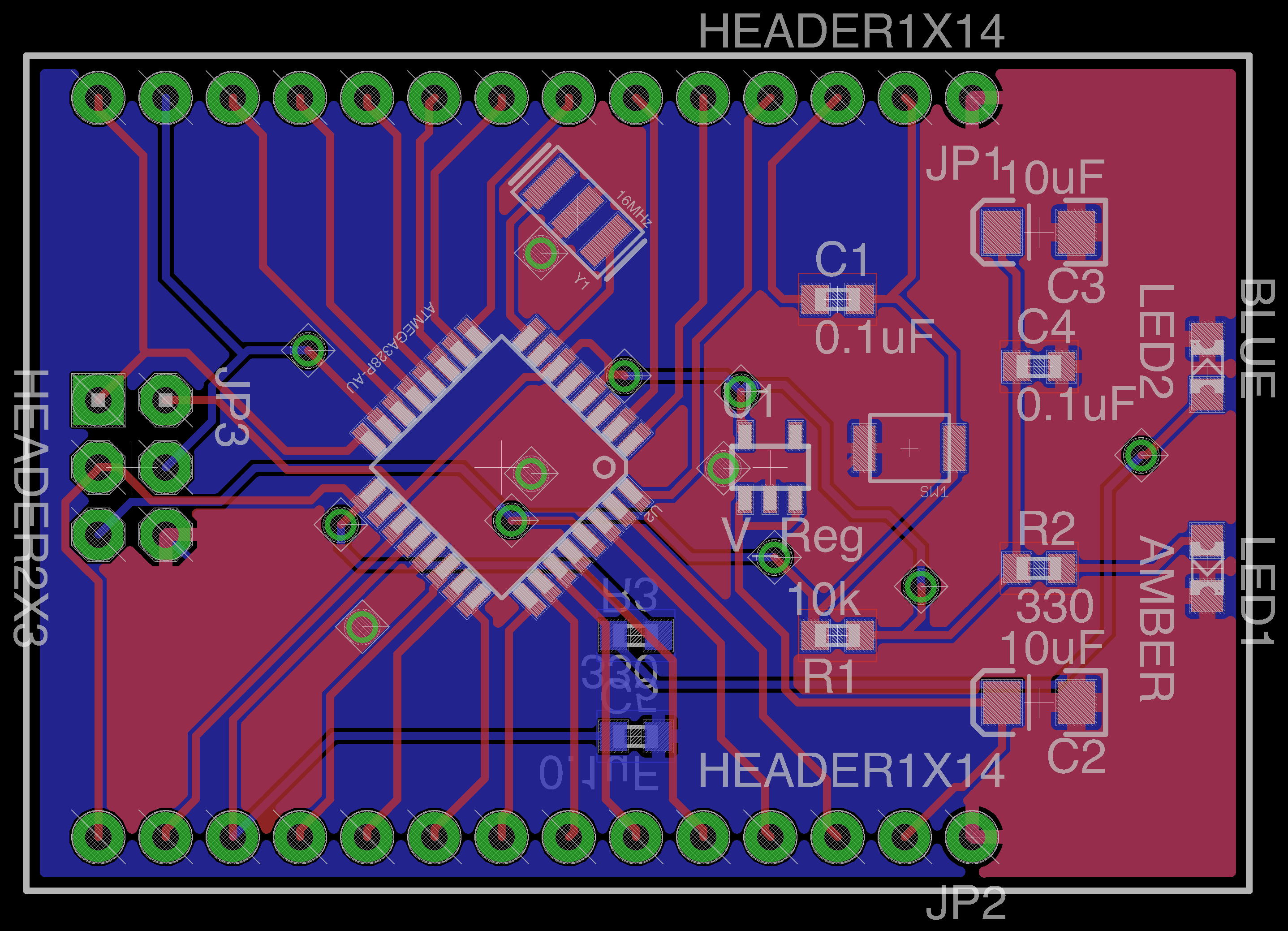
I've designed various PCBs for courses, work and projects. The thumbnail is my first project using EAGLE for PCB design, its a simple Arduino equiped with a Atmega328P microcontroller. It can be programmed by the Arduino IDE via an FTDI interface. The complete gallery is here
Beverage Distinction for Keurig Coffee Machine
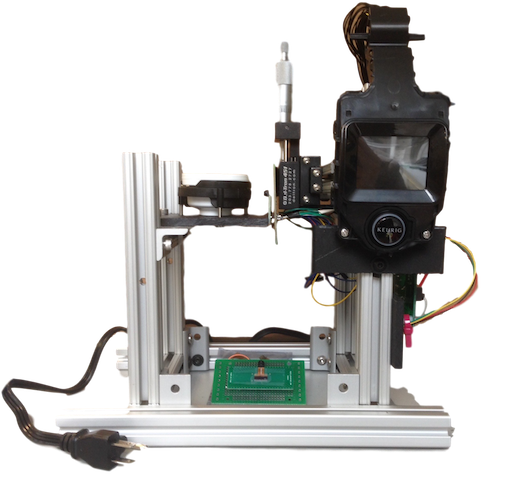
While working for Keurig, I developed a bar code reading prototype for their coffee machine. Yep you're a right, a coffee machine that can read bar code. dumb idea isn't it? At the time, Keurig wants to identify the beverage you put in the machine and adopt different brewing process. I developed a prototype that uses a CMOS sensor to take a picture of the bar code that's attached to the side of the cup and recognize it. I stripped down the coffee machine to its PCB and TFT screen and used the native micro-controller (PIC-16) on the coffee machine to interface with the camera and process the image.
Phone Car
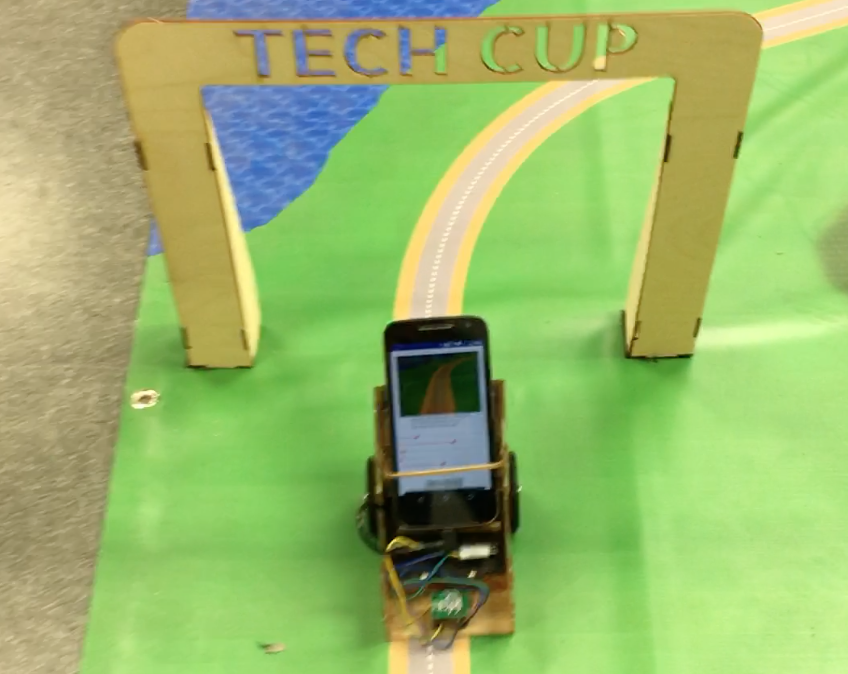
Self-driving car isn't that hard (come on Uber/Tesla/Google!). Jk, this is a simple mechatronics project that I built to use a phone camera to track the course. The phone talks to a PIC32 micro via USB-CDC, then the PIC32 in turn control a motor to follow the course. More info can be found in this repo. The control needs a lot of tuning but this project focuses more on the system integration side instead of the actual image processing and control. See video demo
Interesting Simulations
Learning about numerical methods/differential equations over the years, there are some mini course projects of dynamical systems that are interesting.
- Boid Synchronization: Swarms in nature (i.e. flocks of fish) follow some simple dynamics to move together. This is a trivial example.
- Binary Stars: Binary stars slowly colliding with each other.