Our token delivery system basically revolves around the use of a stepper motor to turn a disk housing 12 chips whose bottoms contact a separate, fixed disk with a cutout slot. As the motor turns, the chips proceed to move over this slot and fall through onto a ramp that herds them towards the force bins.

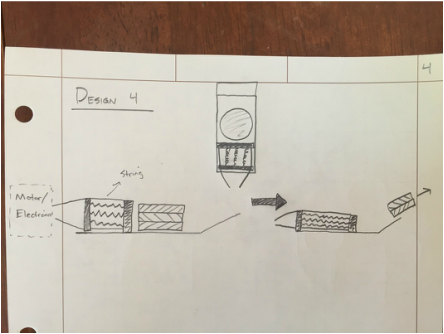
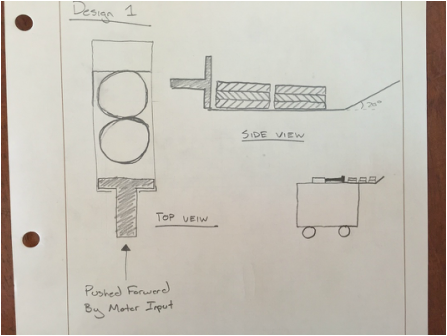
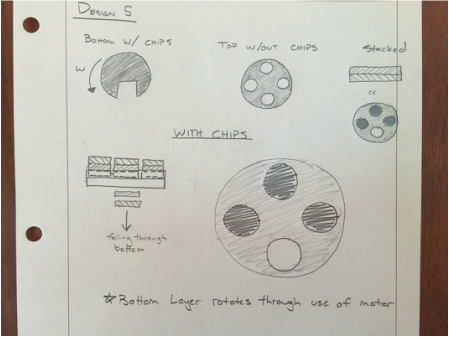
Originally, we had toyed with the idea of using a linear actuator to dump chips by pushing them one at a time into bins, however we felt that this design added unneeded complexity without complementary functionality. Eventually, we fell into this idea of a rotating plate with a stepper motor that would release chips when they were exposed to an open slot. Initially, we figured we could just move over the top of the bins and drop the chips straight down on their sides. This can be seen in Design Sketch 5 below. However, we soon realized it would be much easier for us to stay on the horizontal tape line demarcating the bins, and that we could still dump chips and stay on the line by incorporating a ramp.
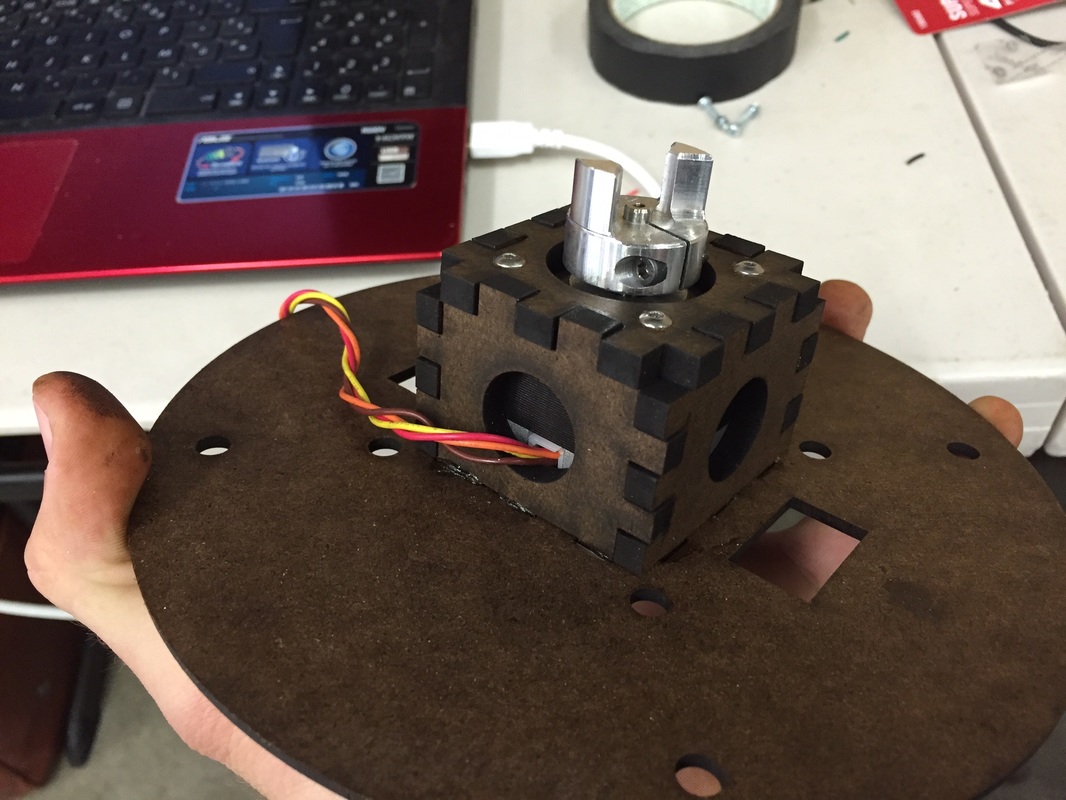
This led to our final design which incorporated two plates and a fixed stepper motor. The top plate is rigidly attached to the stepper motor and therefore is able to spins 360 degrees. This plate also incorporates twelve slots used to hold poker chips oriented on their 3mm width. The bottom plate is rigidly fixed approximately 20 cm below the top plate, and incorporates a 5 mm wide slit extending from its center to its outer diameter. Note that the bottom of the poker chips contact this bottom plate. When working together, the top plate spins, taking the poker chips with it, and when a given poker chip moves over the open slit in the bottom plate it falls through. Attached to the bottom of this slit and angled downward is a small ramp. The end of this ramp should ideally be placed over a bin, allowing it to catch a falling chip and let it simply roll into the bin.

The stepper motor itself is rigidly fixed to the upper middle plate of the bot through an elaborate box housing subsystem as seen below. The 5mm output shaft of this motor is then connected to a 10 mm steel shaft via the use of a spider coupler. Although a bit overkill, this just provided a more robust design that made sure our token delivery mechanism consistently functioned. Note that initially we had planned to mount the motor by screwing it to the upper middle plate of our bot. However, we attached the coupler to the wrong motor shaft and in the process stripped the screws of the coupler, forcing us to adapt our design. Hence we built an elaborate box around the motor, screwed the top of this box to the motor in order to rigidly fixture it, and supported it on the bottom plate through the 'tongue and cheek' mating previously discussed.
We really liked how our token delivery system turned out, and thought it was both an elegant and effective design. However, in terms of the competition, it was not an optimal design because it simply did not deposit chips fast enough. Our only chance of winning would have been to deposit a single chip in each of the five bins as fast as possible. Still, it worked fantastically well for checkoff, and was our most reliable and effective subsystem. It also inspired another group to copy us, which is always a good sign.


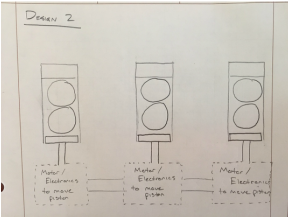
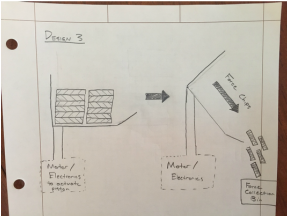
Note that initially we had a lot our ideas for how to design our token delivery system. Like I said earlier, we toyed with the idea of using a linear actuator as seen in Design 1 below. We also had the idea, like a lot of other groups, of dumping 12 chips at a time into a single bin as described in Design 3 below. Furthermore, we also thought about simply depositing chips with arms into the three central bins as seen in Design 2. This strategy ultimately seemed to be the most effective for the competition. However, we ultimately settled for the revolving disk idea, the original iteration of which can be seen in Design 5.
|
|
|
|
|