|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
#include <SDatabase.hpp>
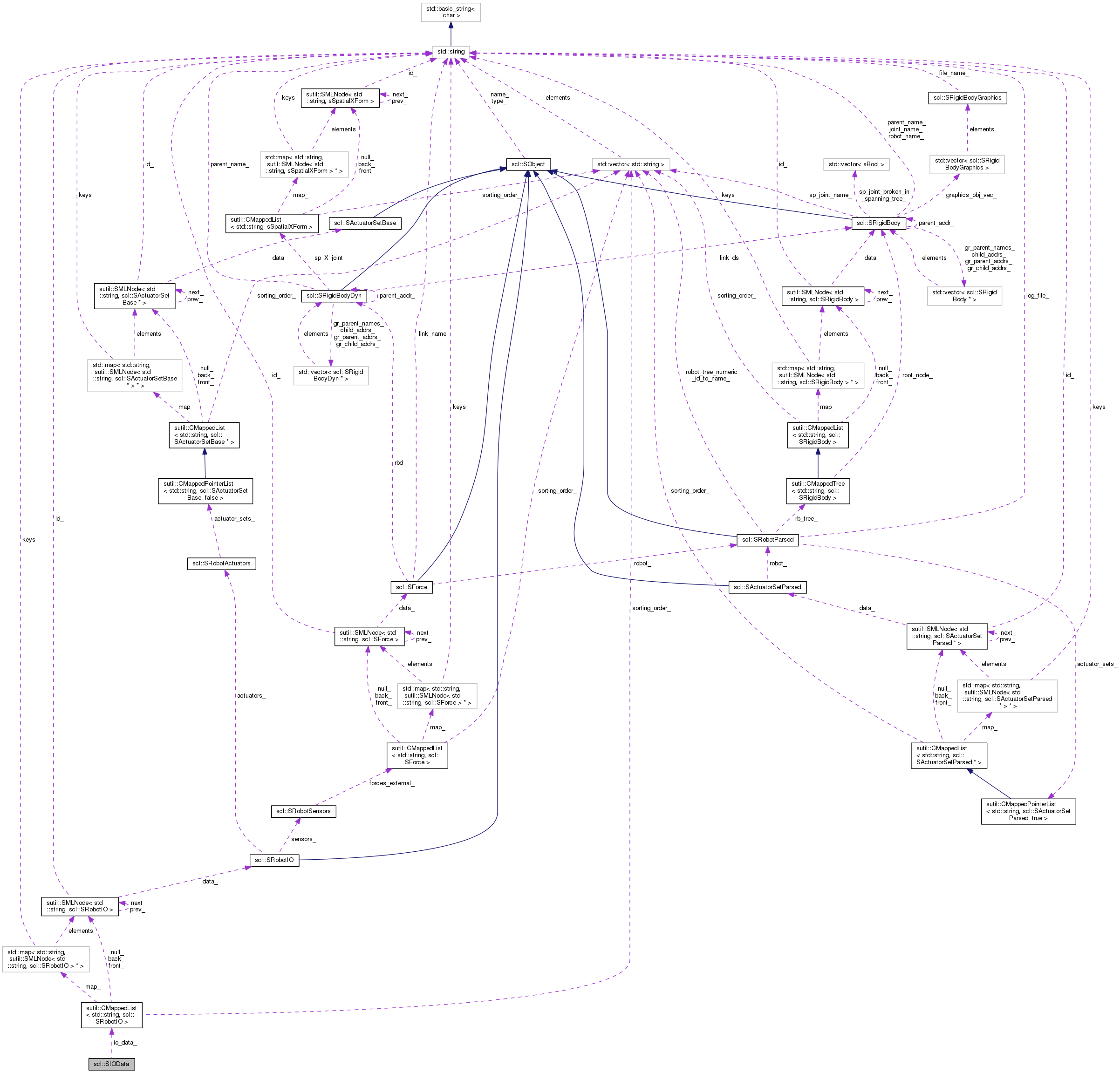
Public Attributes | |
| sutil::CMappedList < std::string, SRobotIO > | io_data_ |
Contains all the dynamically updated input output data.
Wbc's modules (controller, graphics, simulator etc) typically either read or write (not both) to the IO module.
Egs. Input Data : Sensor data from a robot. Simulation logs. Output Data : Actuator command torques. Simulation forces.
| sutil::CMappedList<std::string, SRobotIO> scl::SIOData::io_data_ |
A pile of io data objects containing robot sensor + actuator data. String ID = Robot name Each robot thus has a unique IO data structure.
 1.8.6
1.8.6

