|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
|
SCL
1.0
Standard Control Library : Control, dynamics, physics, and simulation
|
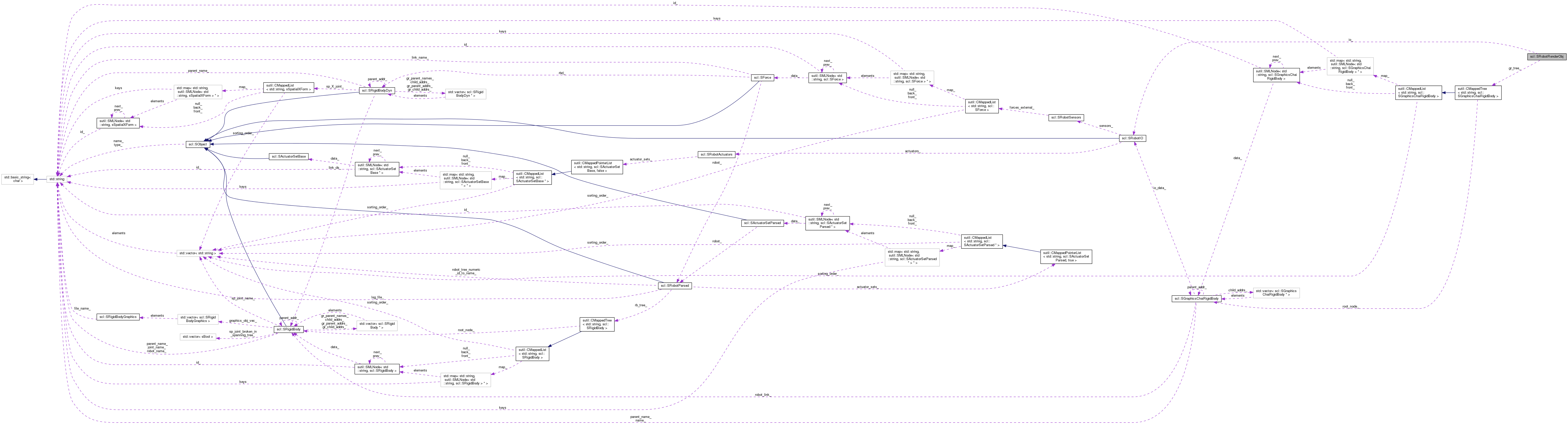
#include <SGraphicsChai.hpp>
Public Attributes | |
|
sutil::CMappedTree < std::string, SGraphicsChaiRigidBody > | gr_tree_ |
| const SRobotIO * | io_ |
Simple container object for associating static and dynamic graphics data NOTE TODO: Consider moving this inside SGraphicsChai
 1.8.6
1.8.6

