From an exterior view the mechanical design of our robot seems rather haphazard. The most popular structure championed by other groups involves a layer-by-layer construction, where the "bare bones" are laid in a simple three-layered design resembling a tiered cake. While this formulation is no doubt useful from a point of stability and foundation, it adds on a great deal of unnecessary extra weight to the robot that must be accounted for in both code, motor design, and power supply (particularly when thick material is chosen for this basis).
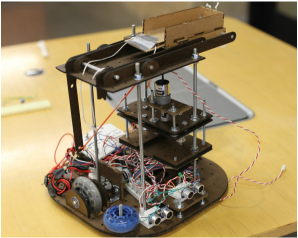
We therefore chose to neglect this option, opting instead for a modular design that constructed separate entities based off of the function they were required to fulfill. At the end, they were linked together via four main metal pillars that ran through the entire robot and connected each using metal washers/nuts in a tight sequence. This structure not only fulfilled all functional requirements, but also provided ample stability and strength once all components were securely fastened and tightened.
The modules were as follows:
The modules were as follows:
- A wheel base module that provided the main function of movement, as well as allowing the means for secondary functions of both tape and border sensing by providing convenient sensor mounts.
- A arm attachment that provided the main function of dunking balls
- A shooting attachment (unfinished) that provided the main function of shooting balls. (See Note: Mechanical Design)