Table of Contents
Stanford Intelligent Systems Laboratory (SISL)

Constrained POMDP planning using learned safety surrogates

Robert J. Moss, Arec Jamgochian, Johannes Fischer, Anthony Corso, and Mykel J. Kochenderfer, ConstrainedZero: Chance-Constrained POMDP Planning Using Learned Probabilistic Failure Surrogates and Adaptive Safety Constraints, International Joint Conference on Artificial Intelligence (IJCAI), 2024.
Robert J. Moss, Arec Jamgochian, Johannes Fischer, Anthony Corso, and Mykel J. Kochenderfer, Chance-Constrained POMDP Planning with Learned Neural Network Surrogates, IJCAI Workshop on Trustworthy Interactive Decision-Making with Foundation Models, 2024.


Belief-state planning for long-horizon POMDPs
 |
Robert J. Moss, Anthony Corso, Jef Caers, and Mykel J. Kochenderfer, BetaZero: Belief-State Planning for Long-Horizon POMDPs Using Learned Approximations, Reinforcement Learning Journal (RLJ), 2024.
Survey of black-box safety validation algorithms

Anthony Corso, Robert J. Moss, Mark Koren, Ritchie Lee, and Mykel J. Kochenderfer, A Survey of Algorithms for Black-Box Safety Validation of Cyber-Physical Systems, Journal of Artificial Intelligence Research (JAIR), 2021.
Probabilistic risk assessment of autonomous vehicles

Robert J. Moss, Shubh Gupta, Robert Dyro, Karen Leung, Mykel J. Kochenderfer, Grace X. Gao, Marco Pavone, Edward Schmerling, Anthony Corso, Regina Madigan, Matei Stroila, and Tim Gibson, Autonomous Vehicle Risk Assessment, Stanford Center for AI Safety, 2021.
Robert J. Moss, Predictive Risk for Efficient Black-Box Validation of Autonomous Vehicles, Stanford University (CS229: Machine Learning), 2021.
Robert J. Moss, Adversarial Weakness Recognition for Efficient Black-Box Validation, Stanford University (CS230: Deep Learning), 2020.
Emergency evacuations under compounding levels of uncertainty

Lisa J. Einstein, Robert J. Moss, and Mykel J. Kochenderfer, Prioritizing Emergency Evacuations Under Compounding Levels of Uncertainty, IEEE Global Humanitairan Technology Conference (GHTC), 2022.
Stress testing autonomous systems
 |  |
Robert J. Moss, Lee Ritchie, Nicholas Visser, Joachim Hochwarth, James G. Lopez, and Mykel J. Kochenderfer, Adaptive Stress Testing of Trajectory Predictions in Flight Management Systems, AIAA/IEEE Digital Avionics Systems Conference (DASC), 2020.
Robert J. Moss, POMDPStressTesting.jl: Adaptive Stress Testing for Black-Box Systems, Journal of Open Source Software (JOSS), 2021.
Michael Durling, Heber Herencia-Zapana, Baoluo Meng, Mike Meiners, Joachim Hochwarth, Nicholas Visser, Ritchie Lee, Robert J. Moss, and Vidhya Tekken Valapil, Certification Considerations for Adaptive Stress Testing of Airborne Software, AIAA/IEEE Digital Avionics Systems Conference (DASC), 2021.
Surrogate model-based optimization
 |
Robert J. Moss, Cross-Entropy Method Variants for Optimization, arXiv 2009.09043, 2020.
Stanford Doerr School of Sustainability
Sequential optimization of geothermal energy production
 |
Research in progress.
Safe carbon capture and storage (CCS)
 |  |  |
| Random Policy | Expert Policy | POMDP Policy |
Yizheng Wang, Markus Zechner, Gege Wen, Anthony Louis Corso, John Michael Mern, Mykel J. Kochenderfer, and Jef Karel Caers, Optimizing Carbon Storage Operations for Long-Term Safety. arXiv 2304.09352 (Under Review), 2023.
[1] Figures courtesy of Yizheng Wang.
Model-fidelity sensitivity analysis for POMDPs
 |
Robert J. Moss, Mariia Kozlova, Anthony Corso, and Jef Caers, Model-Fidelity Analysis for Sequential Decision-Making Systems Using Simulation Decomposition: Case Study of Critical Mineral Exploration, Routledge (Under Review), 2023.
Mariia Kozlova, Robert J. Moss, Julian Scott Yeomans, and Jef Caers, Uncovering Heterogeneous Effects in Computational Models for Sustainable Decision-Making, Environmental Modelling & Software (Under Review), 2023.
Sequential decision making for critical mineral exploration

Xwing (Autonomous Cargo Aircraft)
Failure probability estimation
 |
Robert J. Moss, Mykel J. Kochenderfer, Maxime Gariel, and Arthur Dubios, Bayesian Safety Validation for Failure Probability Estimation of Black-Box Systems, AIAA Journal of Aerospace Information Systems (JAIS), 2024.
Robert J. Moss, Mykel J. Kochenderfer, Maxime Gariel, and Arthur Dubios, Bayesian Safety Validation for Black-Box Systems, AIAA AVIATION Forum, 2023.
Certification of machine learning avionics systems
 |
Jean-Guillaume Durand, Arthur Dubois, and Robert J. Moss, Formal and Practical Elements for the Certification of Machine Learning Systems, AIAA/IEEE Digital Avionics Systems Conference (DASC), 2023.
NASA Ames Research Center
Autonomous rover validation
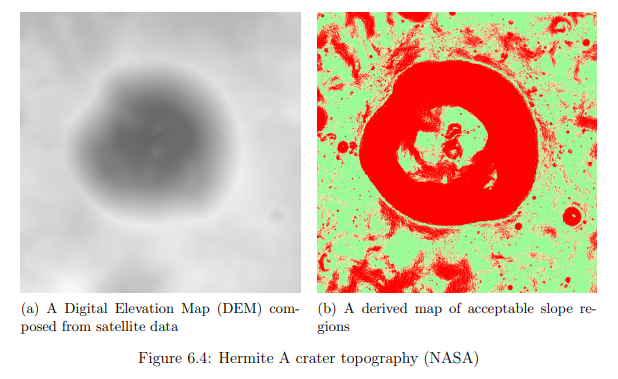 |  |
[1] Figures courtesy of Edward Balaban.
MIT Lincoln Laboratory
Traffic advisory optimization
 |
Pilot response modeling
 |
Edward H. Londner, and Robert J. Moss, Bayesian Network Model of Pilot Response to Collision Avoidance System Resolution Advisories, Journal of Air Transportation (JAT), 2018.
———, A Bayesian Network Model of Pilot Response to TCAS Resolution Advisories, Air Traffic Management Research and Development Seminar (ATM R&D Seminar), 2017.
Autonomous safety maneuvering

Michael P. Owen, Adam Panken, Robert J. Moss, Luis Alvarez, and Charles Leeper, ACAS Xu: Integrated Collision Avoidance and Detect and Avoid Capability for UAS, AIAA/IEEE Digital Avionics Systems Conference (DASC), 2019.
Large-scale safety validation
 |
Adam Gjersvik, and Robert J. Moss, A Parallel Simulation Approach to ACAS X Development, IEEE High Performance Extreme Computing Conference (HPEC), 2019.
Algorithm specification languages
 |
Robert J. Moss, Using Julia as a Specification Language for the Next-Generation Airborne Collision Avoidance System (ACAS X), JuliaCon, 2015.
Wildfire resource allocation
 |  |
J. Daniel Griffith, Mykel J. Kochenderfer, Robert J. Moss, Velibor V. Mišić, Vishal Gupta, and Dimitris Bertsimas, Automated Dynamic Resource Allocation for Wildfire Suppression, Lincoln Laboratory Journal, 2017.
Dimitris Bertsimas, J. Daniel Griffith, Vishal Gupta, Mykel J. Kochenderfer, Velibor V. Mišić, and Robert J. Moss, A Comparison of Monte Carlo Tree Search and Mathematical Optimization for Large Scale Dynamic Resource, arXiv 1405.5498, 2014.
Wentworth Institute of Technology
Galactic rotation curve modeling
 |
James G. O'Brien, Thomas L. Chiarelli, Jeremy Dentico, Modestas Stulge, Brian Stefanski, Robert J. Moss, and Spasen and Chaykov, Alternative Gravity Rotation Curves for the LITTLE THINGS Survey, The Astrophysical Journal, 2018.
James G. O'Brien, Spasen S. Chaykov, Jeremy Dentico, Modestas Stulge, Brian Stefanski, and Robert J. Moss, Recent Advancements in Conformal Gravity, Journal of Physics: Conference Series, 2017.
James G. O'Brien, and Robert J. Moss, Rotation Curve for the Milky Way Galaxy in Conformal Gravity, Journal of Physics: Conference Series, 2015.
Robert J. Moss, and James G. O'Brien, Rotation Curve Modeler: A Modeling and Simulation Tool for Arbitrary Galaxies, Wentworth Institute of Technology, 2014.