
Bio
I'm currently pursuing a Ph.D. at Stanford University, working with Prof. Mac Schwager in the Multi-Robot Systems Lab. My research interest is multi-robot systems, for which I design distributed planning and control algorithms that enable a group of intelligent robots to either collaborate on a common task, or compete among adversarial agents. I received my M.S. from Boston University in 2016, and a B.S. from Beihang University in 2013.
Robots
"Some robots I designed and built since 2010."
MSL RC Car: Safe, Interactive Autonomous Driving
, Mingyu Wang (2017)
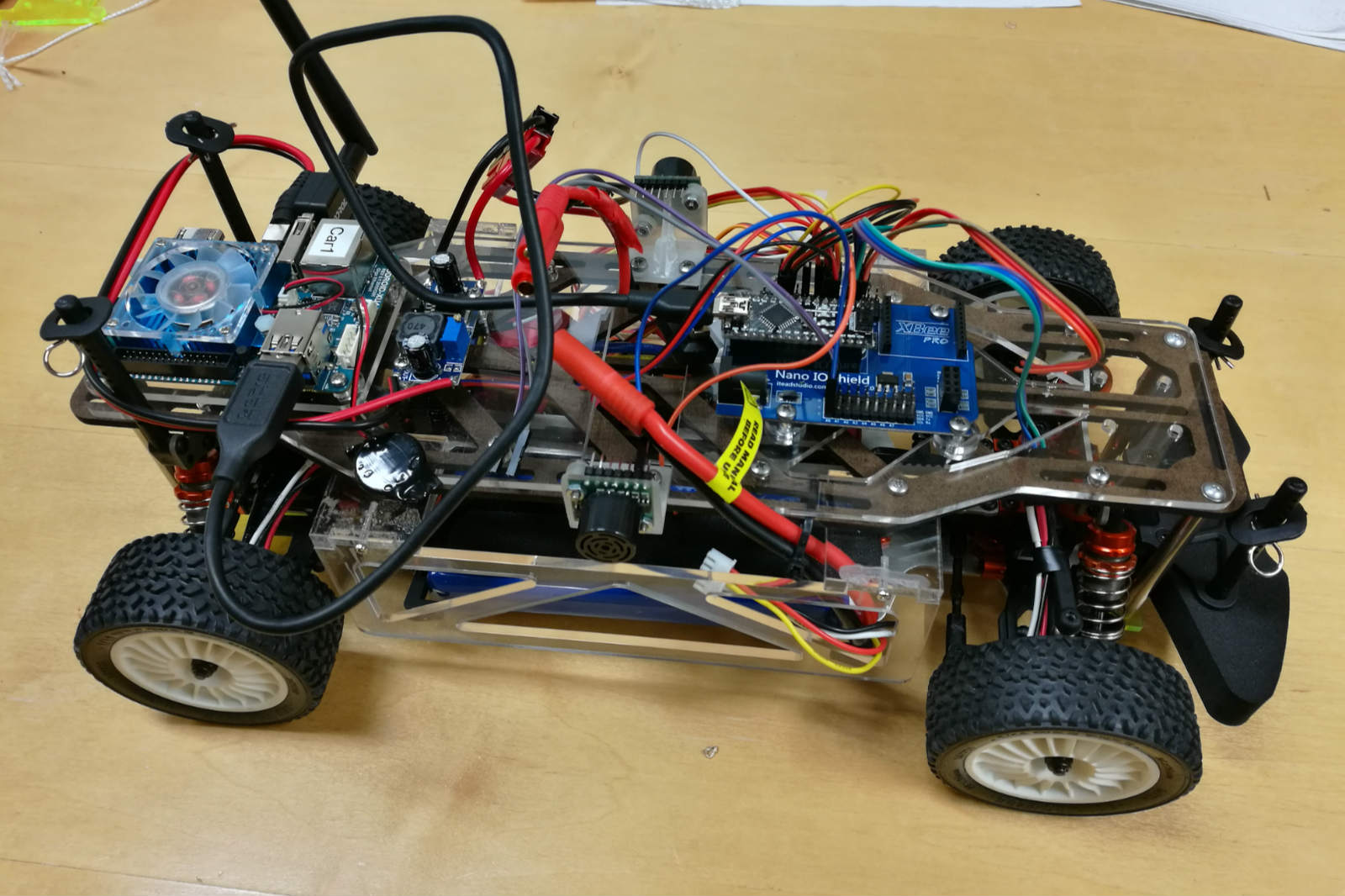
An accessible and high-fidelity test bed for studying the iteractions among multiple autonomous cars.
MSL Quadrotor: Cooperative Aerial Manipulation
(2017)

Built for scalable airborne robotic swarm applications, especially for cooperative aerial manipulation, package delievry and so on.
OuijaBot: a ROS-compatible Omnidirectional Multi-Robot Research Platform
, Guang Yang, Xuanshuo Su (2016)
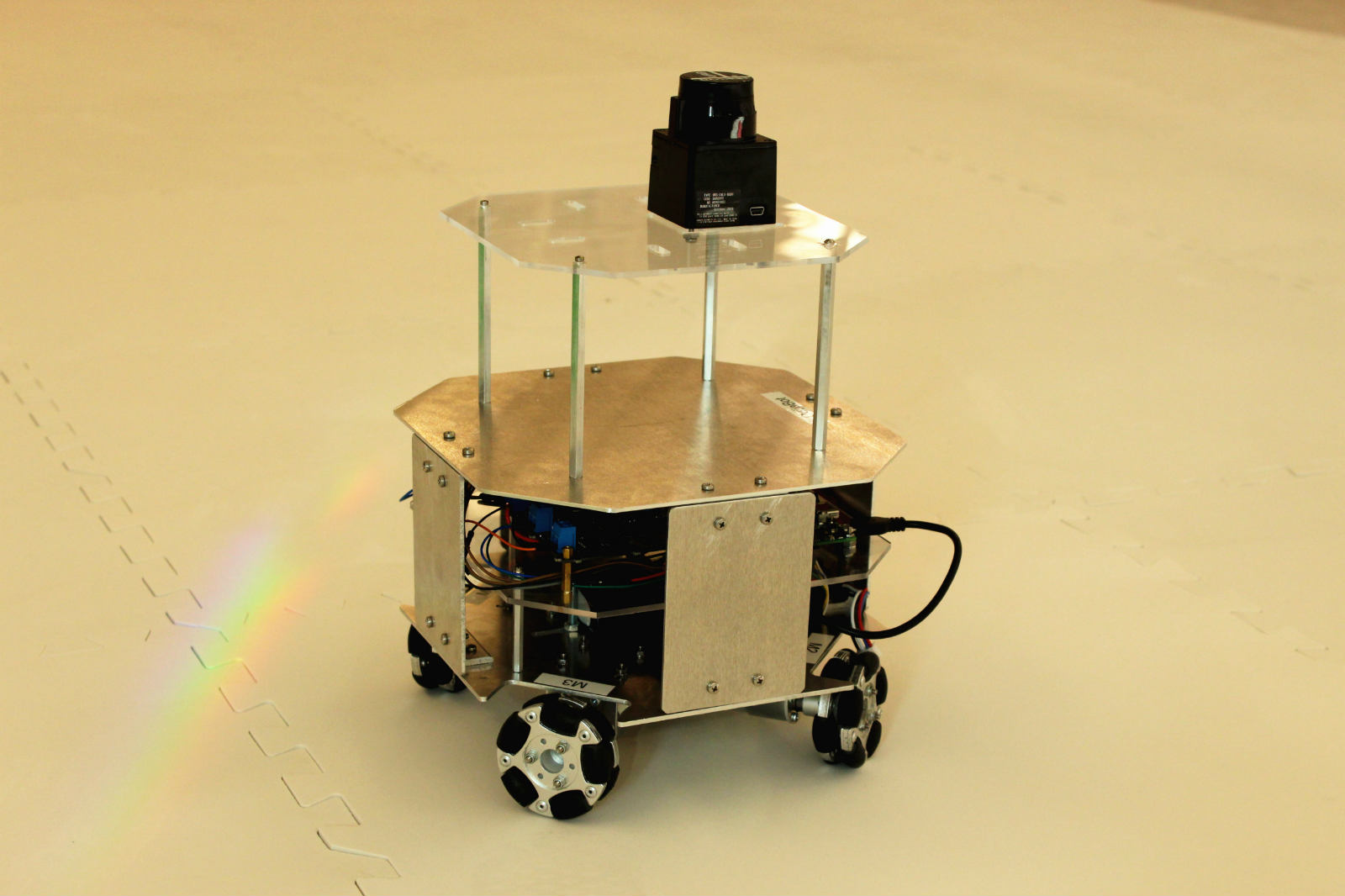
OuijaBot was originally designed for a multi-robot mobile manipulation experiment, and later used as a general low-cost research robot platform in the lab. Some of its features include:
m3pi Manipulator: Proof-of-Concept Swarm Mobile Manipulation
(2015)
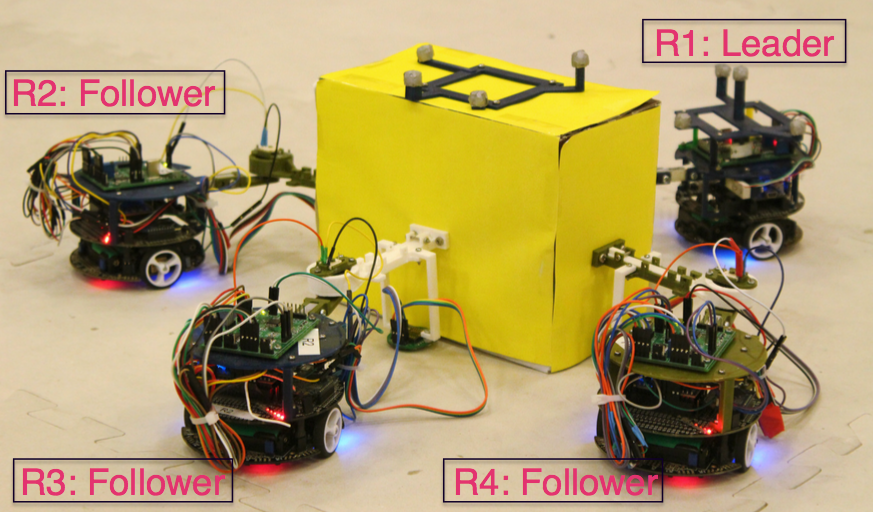
A group of robots that collectively tranport a heavy load without communication by locally measuring the velocity of the object and performing force feedback control.
Biomimetic Robotic Boxfish
, Zerui Wang (2012)

A biomimetic fish robot testbed that mimics the boxfish (also known as ostraciiform fish). It features:
Molecubes: Modular Self-reconfigurable Robots
, Jianbo Yang (2011)
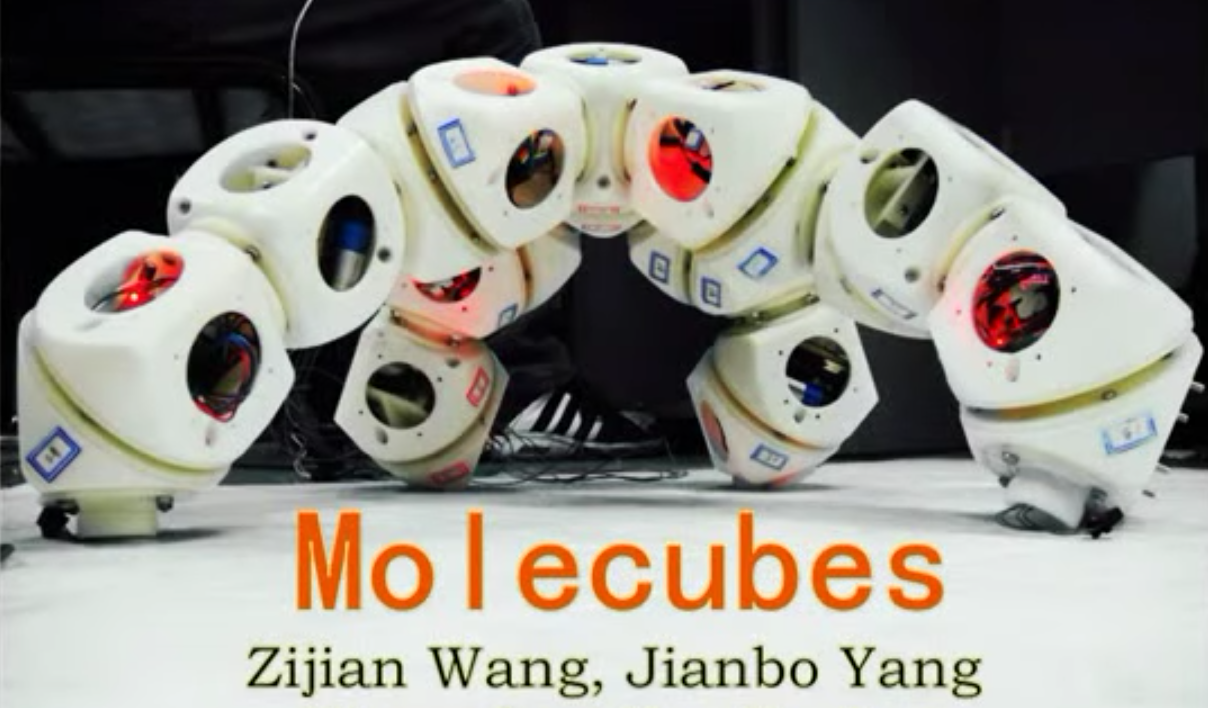
A heavily handcrafted modular robot system (12 modules were built).
Publication
Journal
- D. Zhou, Z. Wang and M. Schwager, "Agile Coordination and Assistive Collision Avoidance for Quadrotor Swarms Using Virtual Structures," IEEE Transactions on Robotics, vol. 34(4), pp. 916-923, 2018.
- A. Pierson, Z. Wang and M. Schwager, "Intercepting Rogue Robots: An Algorithm for Capturing Multiple Evaders with Multiple Pursuers," IEEE Robotics and Automation Letters (RA-L), vol. 2(2), pp. 530–537, 2017.
- D. Zhou, Z. Wang, S. Bandyopadhyay and M. Schwager, "Fast, On-line Collision Avoidance for Dynamic Vehicles using Buffered Voronoi Cells," IEEE Robotics and Automation Letters (RA-L), vol. 2(2), pp. 1047–1054, 2017.
- W. Wan, B. Shi, Z. Wang, R. Fukui, "Multirobot Object Transport via Robust Caging," IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017
- Z. Wang, M. Schwager, "Force-Amplifying N-Robot Transport System (Force-ANTS) for Cooperative Planar Manipulation without Communication," International Journal of Robotics Research (IJRR), vol. 35, no. 13, pp. 1564-1586, 2016
Conference
- Z. Wang R. Spica and M. Schwager, "Game Theoretic Motion Planning for Multi-Robot Racing," International Symposium on Distributed Autonomous Robotic Systems (DARS), 2018, Accepted.
- M. Wang, Z. Wang, J. Talbot, J. C. Gerdes and M. Schwager, "Experiments in Game Theoretic Planning for Self-Driving Cars," Internatinoal Symposium on Experimental Robotics (ISER), 2018, Submitted.
- Z. Wang, S. Singh, M. Pavone, and M. Schwager, "Cooperative object transport in 3D with multiple quadrotors using no peer communication," In Proc. IEEE Conf. on Robotics and Automation (ICRA), pp. 1064-1071, 2018.
- M. Wang, Z. Wang, S. Paudel, and M. Schwager, "Safe Distributed Lane Change Maneuvers for Multiple Autonomous Vehicles Using Buffered Input Cells," In Proc. IEEE Conf. on Robotics and Automation (ICRA), pp. 4678-4684, 2018
- Z. Wang, G. Yang, X. Su and M. Schwager, "OuijaBots: Omnidirectional Robots for Cooperative Object Transport with Rotation Control using No Communication," In Proc. of the International Symposium on Distributed Autonomous Robotics Systems (DARS), London, UK, 2016.
- Z. Wang and M. Schwager, "Kinematic multi-robot manipulation with no communication using force feedback," IEEE International Conference on Robotics and Automation (ICRA), pp. 427–432, 2016.
- Z. Wang and M. Schwager, "Multi-robot manipulation with no communication using only local measurements," IEEE International Conference on Decision and Control (CDC), pp. 380–385, 2015.
- G. Habibi, Z. Kingston, Z. Wang, J. McLurkin and M. Schwager, "Pipelined consensus for global state estimation in multi-agent systems," International Conference on Autonomous Agents and Multiagent Systems (AAMAS), pp. 1315-1323, 2015
- Z. Wang and M. Schwager, "Multi-robot manipulation without communication," International Symposium on Distributed Autonomous Robotic Systems (DARS), pp. 135-149, 2014.
- W. Wang, J. Guo, Z. Wang and G. Xie, "Neural controller for swimming modes and gait transition on an ostraciiform fish robot," In Advanced Intelligent Mechatronics (AIM), IEEE/ASME International Conference on, pp. 1564–1569, 2013.
Video Poster Paper Google Scholar
Video Slides Paper Google Scholar
Mentor
"Research opportunity for undergrad students."
Normally every year I have the time to advise 1-2 undergrad student(s) to work with me in the lab. Undergraduate research is an excellent way to learn hands-on skills and build up a solid resume. I had wonderful experience in both serving as a mentor and working as a mentee. If you feel interested, please click the button below to learn more, and email me to check open positions.
- Bottomline: It must be a win-win experience.
-
What You Can Get:
1. Learn cutting-edge robotics technologies through world-class research projects.
2. Develop good practical engineering skills, such as CAD, machining, designing printed circuit board (PCB), soldering, embedded system, microcontroller, sensors, control algorithm, machine learning, software development, etc.
3. One-on-one tutoring from me.
4. Opportunity for co-authoring academic publications in top-tier conferences/journals.
5. A compelling letter of recommendation from me (or even my advisor)
6. Although I cannot pay you, I can occasionally treat you with some of the finest food in town. -
What I expect from you:
1. Be able to spend at least 8 hours/week in the lab for at least 6 months.
2. Highly self-motivated. Quick learner. Enthusiastic about robots.
3. Some experience of the above-mentioned skills is a plus, but not required.
Contact
"Feel free to drop me a line."
Email: zjwang AT stanford.edu
Last update: Jan 15, 2017